Joint transmission: Torque is too low, has to lift 20 Kg, lifts only 9 Kg.
faerietree opened this issue · 2 comments
To ensure speedy design iterations finding a somewhat working hardware configuration, a spreadsheet is used instead of the detailed CFD simulation.
From the first estimations for the joint transmission in the worlddevelopment engineering.ods spreadsheet it became apparent that the current transmission ratio of 15 is too low:
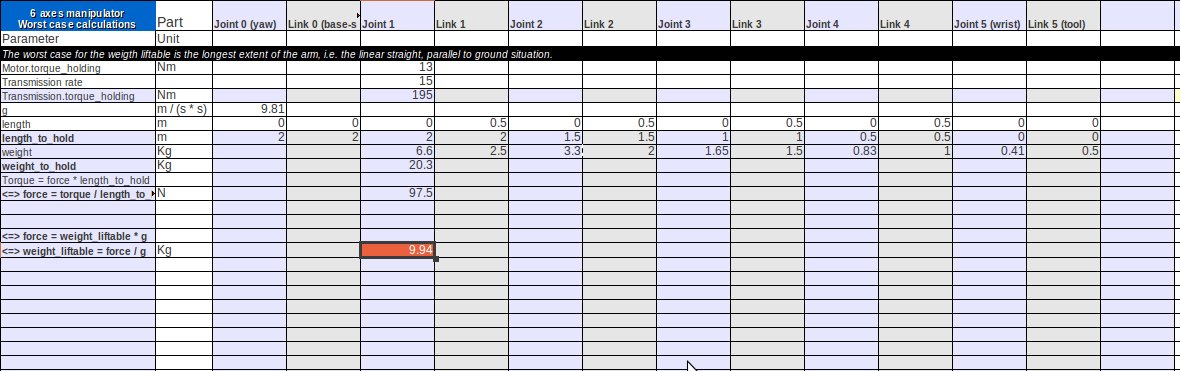
A new iteration promises a new transmission ratio of approximately 32, results in 21.21 Kg liftable weight, which allows tool + payload to weigh (.5 + .91) Kg = 1.41 Kg.
The permissible payload weight may be higher because the new transmission design uses lighter gears, which is not included in the quick approximation outlined in this comment. If .1 Kg per joint is saved, then this amounts to .5 Kg extra liftable weight.
This might then even be enough for attaching a teat cup to a cow's udder. Note milking is a secondary goal of the manipulator after its tremendous manufacturing skills for which 1 Kg of payload is already plenty considering the weight of common bits and drills, band saws, 3D extruders, cookie forms, dough, pancakes, ...
Also it must not be forgotten that the calculation is the worst case scenario for the torque transfer as the most extended and parallel to ground joint configuration (straight arm) is assumed which may not be the case so often in real world robot operations (remember Archimedes' lever).
Further payload weight may be possible when designing custom links, i.e. either mill out not necessary structural parts (subtraction process, have once done this for quadrotors at university, takes way too long and is not scalable) or by bolting or welding smaller easier cheaper to get metal pieces in an addition process (highly scalable!).
Or by using Aluminum or other lightweight, affordable material for the last segement. Note aluminum deforms a lot, i.e. likely reduces accuracy or complicates algorithms.