MultiTrans is a multi channel transceiver, for AVR based Arduinos connected by wire or via IR.
-
Transceiver: Transmit and receive simultaneously via a single pin. (No clock line needed.)
-
Multi channel: Multiple pins can transceive simultaneously.
-
Collision detection: One pin can start sending without worrying if the other side is sending as well. Collisions are automatically detected and circumvented. No information is lost.
-
Infrared option: Bi-directional communication through air, if needed. Further communication channels may be possible as well but have been untested.
-
Maximum uni-directional data rates on an Arduino Uno / Pro Mini:
-
Communication with one peer: 12 kbit/s
-
Communication with four peers: 3 kbit/s
Bi-directional data rates are a little less than half of the above rates in each direction.
-
-
Buffers:
-
The buffer on the transmitting end can contain 256 bits at the most. For each character, 21 bits are necessary. This equates to 12 characters.
-
The buffer on the receiving end can only contain up to 255 pin change events.
-
Flushing the buffer on the receiving end takes some time.
The system is thus best used for short bursts of data with sufficient idle time in between.
-
-
No built-in error checking. You may want to implement your own error checking, to take care of:
-
If you have a flaky connection between the Arduinos, for example due to bad electrical contacts, then bits may get lost.
-
Theoretically, i.e. if timing is perfectly right, the collision detection built into MultiTrans may fail resulting in bit loss.
-
-
It only works with AVR based Arduinos. In fact, code so far has only been tested with the Arduino Pro Mini and the Arduino Uno.
-
Timers are occupied:
-
8-bit Timer/Counter2 (TC2), for transmitting
-
16-bit Timer/Counter1 (TC1), for receiving
-
-
Simple: bi directional communication between two Arduinos
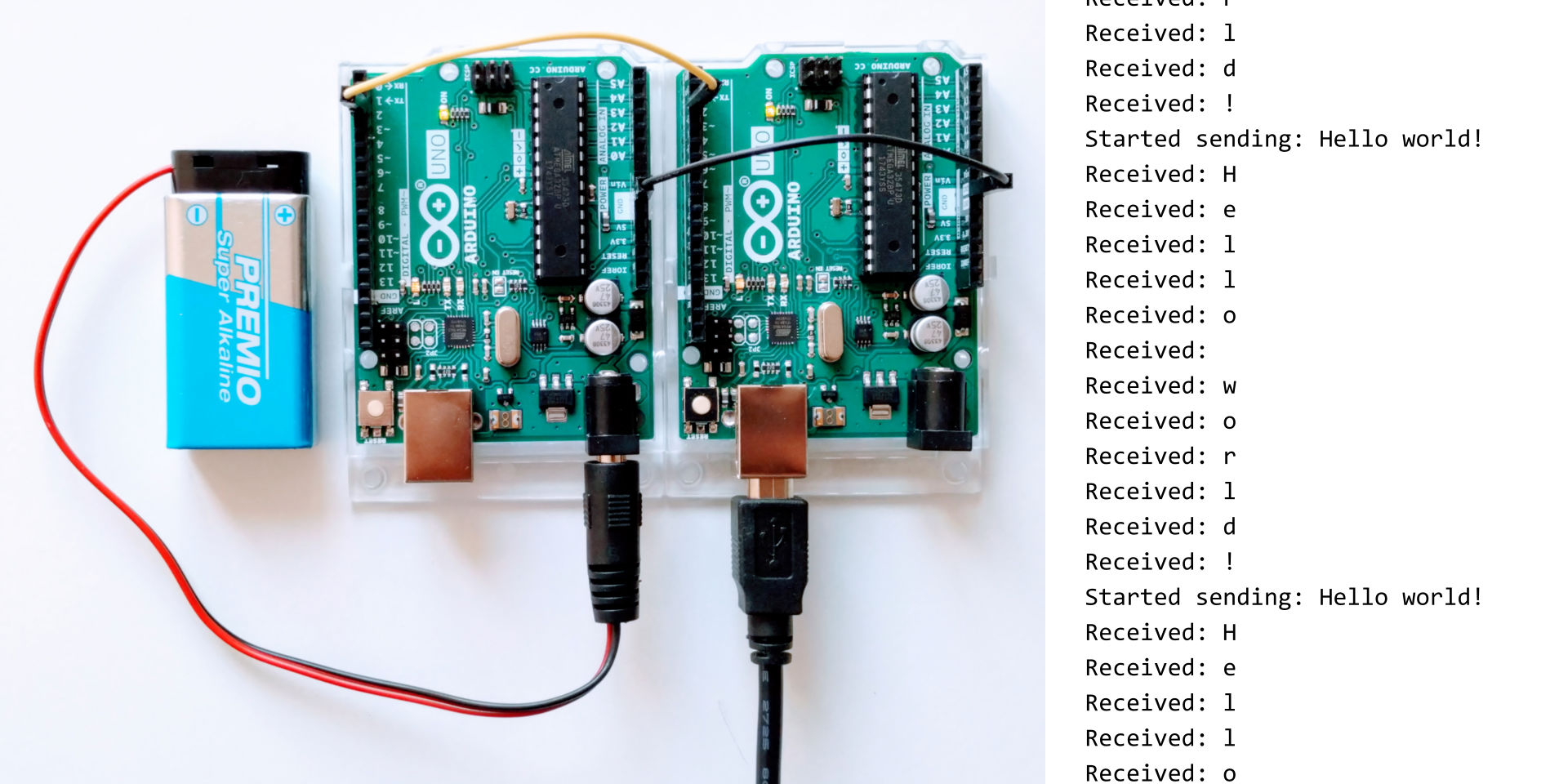
-
Triangle: Arduinos communicating in a triangle
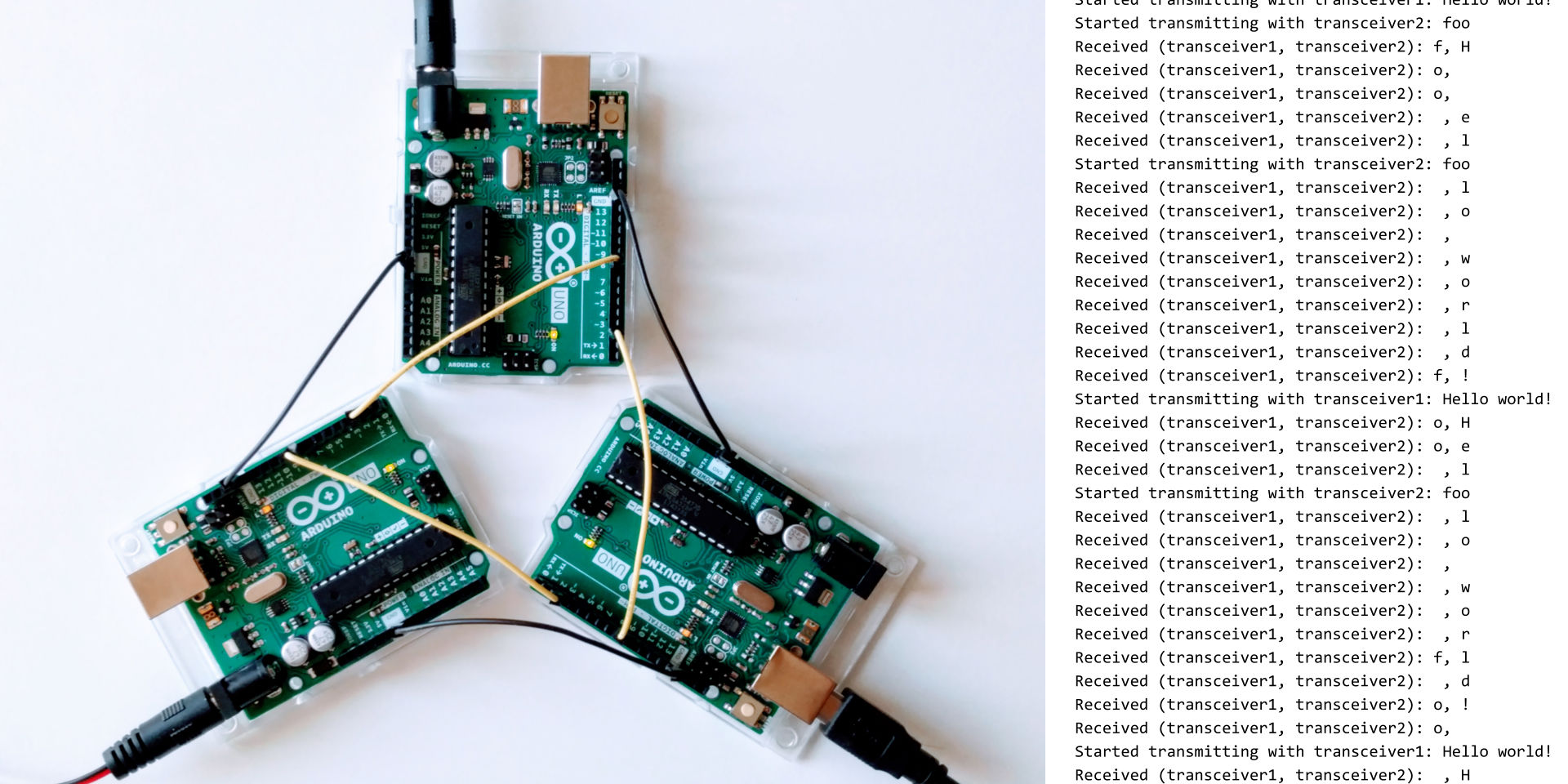
-
Stress test (advanced): for testing maximum and minimum data rates with five Arduinos all communicating simultaneously
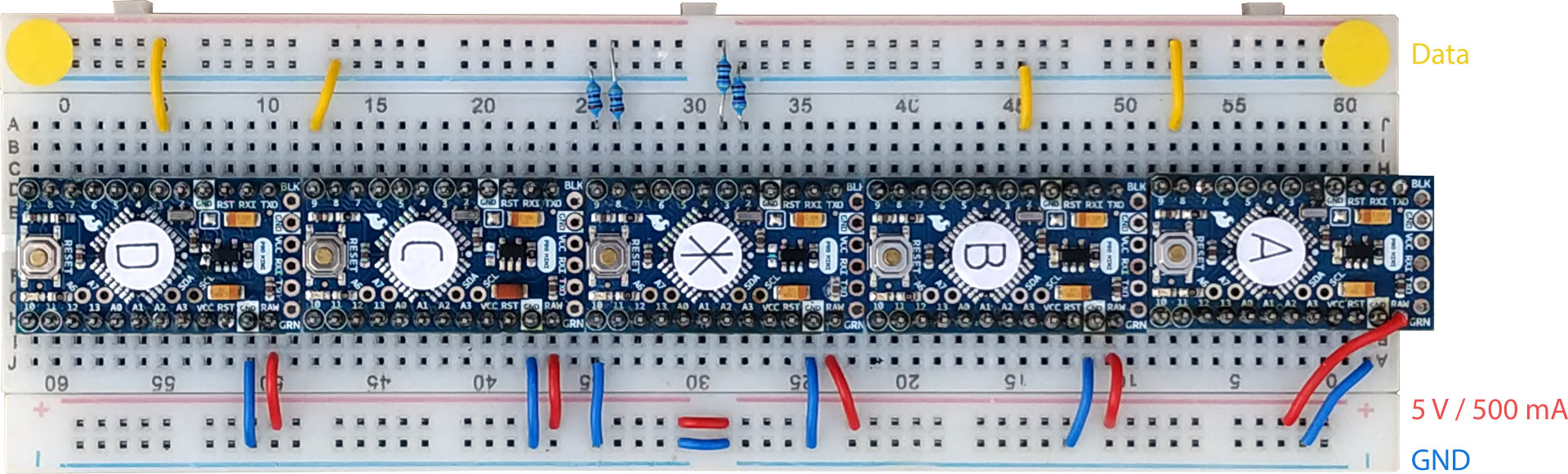
-
IR: bi directional communication through air
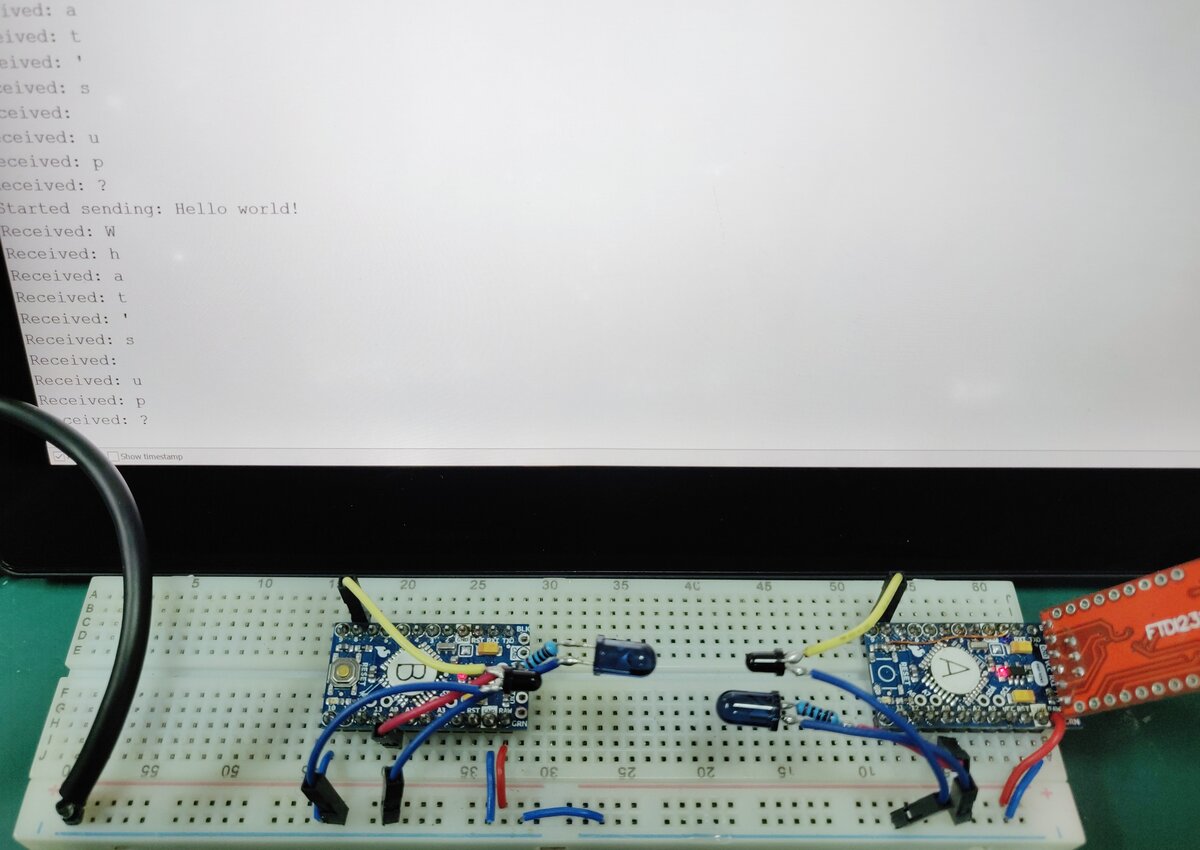




Transmitted are individual characters. Timing diagram:

There is no additional protocol.
Coding conventions are based on the Arduino Style Guide for Writing Libaries with additions:
-
Class (not struct) member variables (not constants) are prefixed with an underscore.
-
Identifiers of template parameters:
-
types:
T,U,V, … -
typed parameters:
t,u,v, …
-
-
Constants follow the same naming conventions as variables.
-
Maximum line length: 80 characters
-
Maximum identifier length: 32 characters
-
To avoid naming conflicts with other Arduino libraries,
#pragma onceinstead of include guards is used, except for the top level include file. -
Comments are written with Markdown syntax.
Except where noted otherwise, files are licensed under the WTFPL.
Copyright © 2018–19 Felix E. Klee
This work is free. You can redistribute it and/or modify it under the terms of the Do What The Fuck You Want To Public License, Version 2, as published by Sam Hocevar. See the COPYING file for more details.