[TOC]
为了方便文档描述,约定如下变量定义:
- BOARD:开发板/产品型号;如Toybrick RK3588开发板的型号是TB-RK3588X0。
- DTB:内核设备树;如Toybrick RK3588开发板的产品内核设备树是rk3588-toybrick-x0-linux。
- ROOT_DIR:边缘计算SDK的工作目录;文档中所示的目录为/home/toybrick/work/edge。
- CHIP:开发板的芯片型号;当前边缘计算SDK支持的芯片型号为rk3588。
- OUT_DIR:编译生成的镜像路径${ROOT_DIR}/out/${CHIP}/${BOARD}/images ,如RK3588 EVB1的路径为/home/toybrick/work/edge/out/rk3588/TB-RK3588X0/images。
- Ubuntu18.04及以上和Debian11版本,内存推荐16GB及以上。
- 系统的用户名不能有中文字符。
- 只能使用普通用户搭建开发环境,不允许用root用户执行。
sudo apt -y install python lz4 coreutils qemu qemu-user-static python3 \
devicetree-compiler clang bison flex lld libssl-dev bc genext2fs git makesudo apt -y install python lz4 coreutils qemu qemu-user-static python3 \
device-tree-compiler clang bison flex lld libssl-dev bc genext2fs git make-
注册github账号,并上传本地ssh公钥
-
执行如下命令获取代码:
git clone git@github.com:rockchip-toybrick/edge.git
Toybrick Wiki (rock-chips.com)
执行如下执行命令,输入产品型号的序号(如:RK3588 EVB1开发板所对应的序号为0)设置配置信息:
./edge set
[EDGE DEBUG] Board list:
> rk3588
0. TB-RK3588X0
Enter the number of the board: 1注意:每次更新或修改边缘计算SDK相关代码后,请重新执行此命令,更新配置。
执行如下命令,查看当前配置信息:
./edge env
[EDGE DEBUG] root path: /home/toybrick/edge
[EDGE DEBUG] out path: /home/toybrick/edge/out/rk3588/TB-RK3588X0/images
[EDGE DEBUG] board: TB-RK3588X0
[EDGE DEBUG] chip: rk3588
[EDGE DEBUG] arch: arm64
[EDGE DEBUG] bootmode: extlinux
[EDGE DEBUG] > Partition:
[EDGE DEBUG] uboot: ['0x00002000', '0x00004000']
[EDGE DEBUG] misc: ['0x00006000', '0x00002000']
[EDGE DEBUG] boot_linux:bootable: ['0x00008000', '0x00020000']
[EDGE DEBUG] recovery: ['0x00028000', '0x00040000']
[EDGE DEBUG] resource: ['0x00068000', '0x00010000']
[EDGE DEBUG] rootfs:grow: ['0x00078000', '-']
[EDGE DEBUG] > Uboot:
[EDGE DEBUG] config: rk3588-toybrick
[EDGE DEBUG] > Kernel:
[EDGE DEBUG] version: 5.10
[EDGE DEBUG] config: rk3588_edge.config rk3588_toybrick.config
[EDGE DEBUG] dtbname: rk3588-toybrick-x0-linux
[EDGE DEBUG] size: 64
[EDGE DEBUG] docker: False
[EDGE DEBUG] debug: 0xfeb50000SDK配置项包含系统配置、安全启动、分区配置、uboot配置、内核配置和文件系统配置。配置说明如下:
- 公共配置保存在vendor/common/config.json。
- 板级配置保存在vendor/${CHIP}/${BOARD}/config.json,其值会覆盖公共配置的同名配置项的值。
- 值为“not set”的配置项必须在《板级配置》中设置;其他配置项可根据实际需要在《板级配置》中修改。
系统配置项包含board、chip、arch和bootmode配置项:
| 配置项 | 描述 | 默认值 | 备注 |
|---|---|---|---|
| board | 开发板或产品型号 | not set | board值必须和vendor/${CHIP}目录下的${BOARD}目录名一致 |
| chip | 芯片型号 | not set | RK3588和RK3588s的芯片型号都设置为rk3588 |
| arch | 芯片架构 | not set | arm或arm64 |
| bootmode | Uboot的启动方式 | extlinux | 支持extlinux和fit两种启动方式 |
系统的分区信息,包括分区名,起始地址和分区大小(起始地址和分区大小的单位为block,每个block的大小为512字节)。编译脚本会根据bootmode设置的启动方式加载part-extlinux和part-fit分区表,分区表信息如下:
part-extlinux:extlinux启动方式的系统分区
| 配置项 | 描述 | 起始地址 | 分区大小 | 备注 |
|---|---|---|---|---|
| uboot | uboot分区 | 0x00002000 | 0x00004000 | 必选 |
| misc | misc分区 | 0x00006000 | 0x00002000 | 烧写进入recovery模式,可选 |
| boot_linux | 内核分区 | 0x00008000 | 0x00020000 | 必选 |
| recovery | recovery分区 | 0x00028000 | 0x00040000 | 必选 |
| resource | resource分区 | 0x00068000 | 0x00010000 | 保存开机LOGO,必选 |
| rootfs | 根文件系统分区 | 0x00078000 | - | 所有剩余空间,必选 |
part-fit: fit启动方式的系统分区
| 配置项 | 描述 | 起始地址 | 分区大小 | 备注 |
|---|---|---|---|---|
| uboot | uboot分区 | 0x00002000 | 0x00004000 | 必选 |
| misc | misc分区 | 0x00006000 | 0x00002000 | 烧写进入recovery模式,可选 |
| boot | 内核分区 | 0x00008000 | 0x00020000 | 必选 |
| recovery | recovery分区 | 0x00028000 | 0x00040000 | 必选 |
| backup | backup分区 | 0x00068000 | 0x00010000 | 可选 |
| rootfs | 根文件系统分区 | 0x00078000 | 0x01c00000 | 必选 |
| oem | oem分区 | 0x01c78000 | 0x00040000 | 可选 |
| userdata | userdata分区 | 0x01cb8000 | - | 所有剩余空间,可选 |
说明:
- 如果起始地址和分区地址都为0,则脚本会忽略此分区。
- OTG口不接USB线、长按recovery按键,系统会从recovery分区引导,并进入紧急修复模式。
- 烧写misc镜像,系统也会从recovery分区引导,并进入紧急修复模式。
| 配置项 | 描述 | 默认值 | 备注 |
|---|---|---|---|
| config | uboot编译配置 | rk3588-edge | configs/rk3588-edge.config |
| 配置项 | 描述 | 默认值 | 备注 |
|---|---|---|---|
| version | 内核版本号 | 5.10 | 目前只支持5.10内核 |
| config | 内核编译配置 | rk3588_edge.config | arch/arm64/configs/rk3588_edge.config |
| size | 内核镜像的大小,单位:M | 64 | auto表示自动调整大小 |
| dtbname | 内核设备树文件名 | not set | 不包含后缀dts |
| docker | 内核配置是否需要支持docker | false | 内核镜像会增大 |
| debug | 芯片调试口物理地址 | not set | 根据芯片配置 |
说明:内核编译配置默认会加载rockchip_linux_defconfig和config配置项指定的配置。
执行如下命令编译所有镜像,并打包update.img,保存在OUT_DIR目录:
./edge build -a执行如下命令生成parameter.txt,保存在OUT_DIR目录:
./edge build -p执行如下命令编译生成MiniLoaderAll.bin和uboot.img镜像,保存在OUT_DIR目录:
./edge build -u执行如下命令编译生成内核镜像,保存在OUT_DIR目录:
./edge build -k说明:
fit启动方式:生成boot.img和recovery.img
extlinux启动方式:生成boot_linux.img、recovery.img和resource.img
执行如下命令编译生成update镜像,保存在OUT_DIR目录:
./edge build -U查看支持的编译参数:
./edge build -h- 连接Type-C口到电脑PC端,按住主板的V+/Recovery按键不放。
- 开发板供电12V,若已经上电,按下复位按键。
- 当开发板进入loader模式后,松开按键。
- 参考《查询烧写状态》章节,确认开发板进入loader模式。
- 连接Type-C口到电脑PC端,按住主板的Maskrom按键不放。
- 开发板供电12V,若已经上电,按下复位按键。
- 当开发板进入loader模式后,松开按键。
- 参考《查询烧写状态》章节,确认开发板进入maskrom模式。
执行如下命令查询烧写状态:
./edge flash -q- none:表示开发板未进入烧写模式。
- loader:表示开发板进入loader烧写模式。
- maskrom:表示开发板进入maskrom烧写模式。
双击打开tools\RKDevTool_Release_v2.84目录下的RKDevTool.exe,界面显示:
-
没有发现设备(如图1-1所示):表示开发板未进入烧写模式。
-
发现一个LOADER设备(如图1-2所示):表示开发板进入loader烧写模式。
-
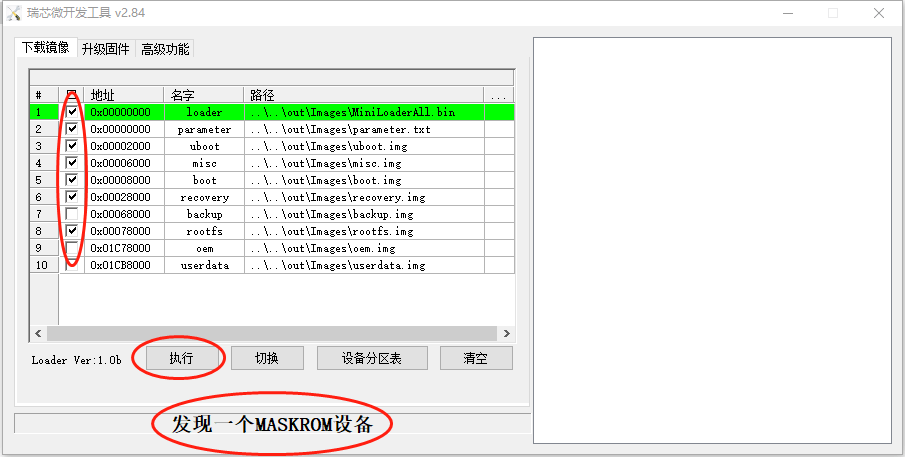
发现一个MASKROM设备(如图1-3所示):表示开发板进入maskrom烧写模式。



烧写所有镜像
./edge flash -a烧写镜像:MiniLoaderAll.bin,uboot.img和parameter.txt
./edge flash -u烧写内核镜像:
- extlinux启动模式会烧写boot_linux.img、recovery.img和resource.img
- fit启动模式会烧写boot.img和recovery.img
./edge flash -k烧写镜像:rootfs.img
./edge flash -r烧写misc镜像: misc.img
./edge flash -m烧写oem镜像: oem.img (仅支持fit启动方式)
./edge flash -o烧写userdata镜像: userdata.img (仅支持fit启动方式)
./edge flash -d查看支持的烧写参数:
./edge flash -h-
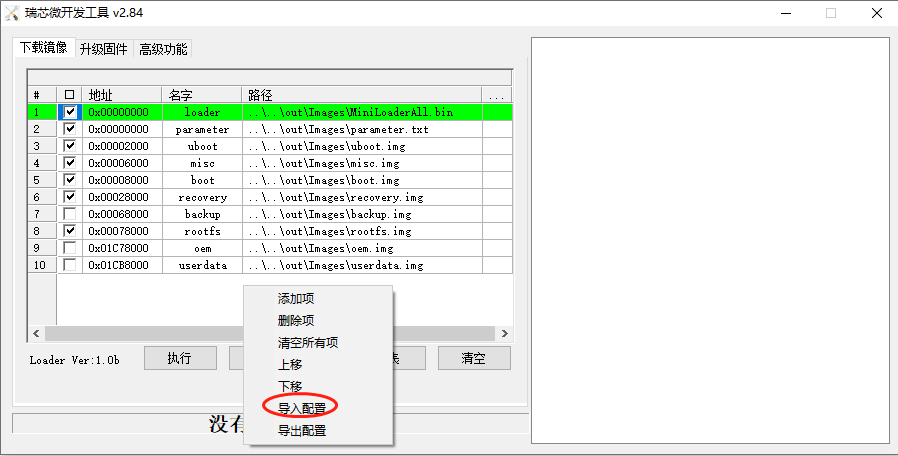
双击打开tools\RKDevTool_Release_v2.84目录下的RKDevTool.exe。
-
在工具的空白处点击右键,选择弹出菜单的"导入配置",如下图所示:

-
选择要烧写的分区配置
-
config-extlinx.cfg:extlinux启动方式
-
config-fit.cfg: fit启动方式
-
-
确认开发板已经进入loader或者maskrom烧写模式。
-
打勾选择需要烧写的镜像。
注意:Loader和Parmeter选项建议打勾选择,其他选项根据需要打勾选择。
-
点击“执行”按钮,开始烧写固件(如图2-1所示)。

用USB线连接主机的USB host口和开发板的调试口(通常开发板上的调试口边上有标有类似"DEBUG" 或 “UART TO USB”的丝印)。
打开设备管理器获取调试串口的端口号,如图3-1所示:

打开串口工具SecureCRT, 点击"快速连接"按钮,打开调试串口配置界面如图3-2和图3-3所示:
- Port: 选择设备管理器显示的端口号
- 波特率: 1500000
- 禁止流控:不勾选RTS/CTS


sudo apt -y install minicom按如下步骤,配置保存串口信息(此步骤执行一次即可):
-
执行如下命令打开minicom
sudo minicom -s
-
进入串口设置界面:输入CTRL-A Z
+-------------------------------+ | Filenames and paths | | File transfer protocols | | Serial port setup | | Modem and dialing | | Screen and keyboard | | Save setup as dfl | | Save setup as | | Exit | +-------------------------------+
-
端口设置:选择"Serial port setup"
-
设置串口设备: 输入"A",填入"/dev/ttyUSB0", 然后按回车确定
-
禁止流控:输入“F”,按回车确定
-
设置波特率:输入“E”,再输入“A”直到显示"Current 1500000 8N1", 然后按回车确认
-
配置完成后,界面显示
+--------------------------------------------------------+ | A - Serial Device : /dev/ttyUSB0 | | B - Lockfile Location : /var/lock | | C - Callin Program : | | D - Callout Porgram : | | E - Bps/Par/Bits : 1500000 8N1 | | F - Hardware Flow Control : No | | G - Software Flow Control : No | +--------------------------------------------------------+
-
退出端口设置:按回车
-
保存配置: 选择"Save setup as dfl"
-
退出设置:选择"Exit"
sudo minicom-
准备一张SD卡(容量不小于16G),通过SD卡读卡器插到windows电脑下USB Host口。
-
双机打开tools\SDDiskTool_v1.69\SD_Firmware_Tool.exe,如图4-1所示:
按界面提示选择磁盘设备、功能模式和update.img的路径,然后点击“开始创建”按钮,开始制作SD卡。
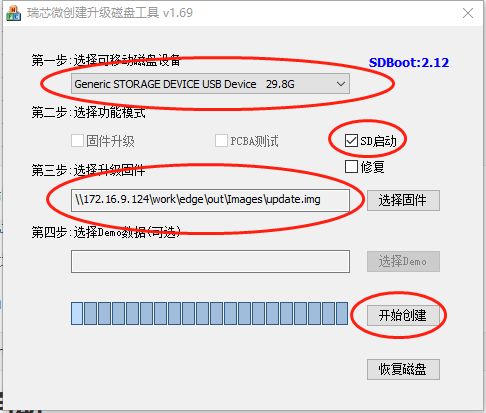

将SD卡从RK3588开发板的SD卡槽重启开机启动,即可从SD卡启动。
- Debian系统软件包: docs/edge/debian
- docker文档:docs/edge/docker
- mpp文档:docs/edge/mpp
- rga文档:docs/edge/rga
- rknn文档:docs/edge/rknn
- python-sdk文档:docs/edge/python-sdk
- ros2文档:docs/edge/ros2