![]()
A simple OPC UA server for Universal robots in ruby, which uses the ur-sock and opcua-smart library.
A simple ruby server, which uses the ur-sock and opcua-smart library.
For this server the OPC UA installation of the opcua-smart gem is required. Please follow the instructions at https://github.com/etm/opcua-smart and install the opcua gem.
Additionally you have to install the URUA gem with:
gem install urua
If you want to develop or extend the server, just use the following instruction
git clone https://github.com/fpauker/urua
git clone https://github.com/fpauker/ur-sock
git clone https://github.com/etm/opcua-smart
Just follow the install instructions of the 3 projects. After installing all packages do
cd urua/server
in this directory the devserver.rb and the devserver.config are located.
To start the server type in the following commands:
cd urua/server
./uruaserver.rb start
or
cd urua/server
./devserver.rb start
to start the developing server.
The server's adress space is shown in the pictures below.
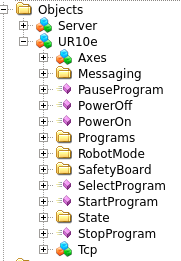
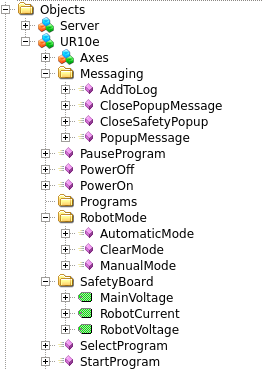
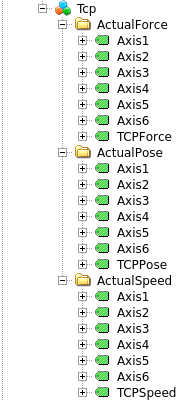
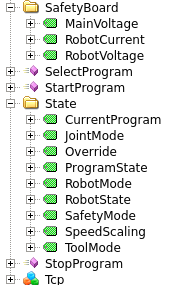
It offers several features combining 3 different interfaces of the Universal robot. It uses the
- Primary Secondary Interface for direct execution of UR scripts
- Dashboard server for orchestration functions e.g. starting/stopping a program
- RTDE interface for getting the robot states
Please read CONTRIBUTING.md for details on our code of conduct, and the process for submitting pull requests to us.
We use SemVer for versioning. For the versions available, see the tags on this repository.
- Florian Pauker - OPC UA Modelling -
- Jürgen Mangler - Ruby Support -
See also the list of contributors who participated in this project.
This project is licensed under the GPL3 License - see the LICENSE.md file for details
- This work has been funded by the FFG