How to drive the motor
工具:
- MATLAB R2016a
- RX-64舵机
- usb转485串口转换器
- 电池
下载 DynamixelSDK,因为写代码时会用到里面的库函数,按照下图将相关文件添加在 MATLAB 设置路径中:

连接如下图所示:
电池连接
usb转485的后面,舵机连接侧面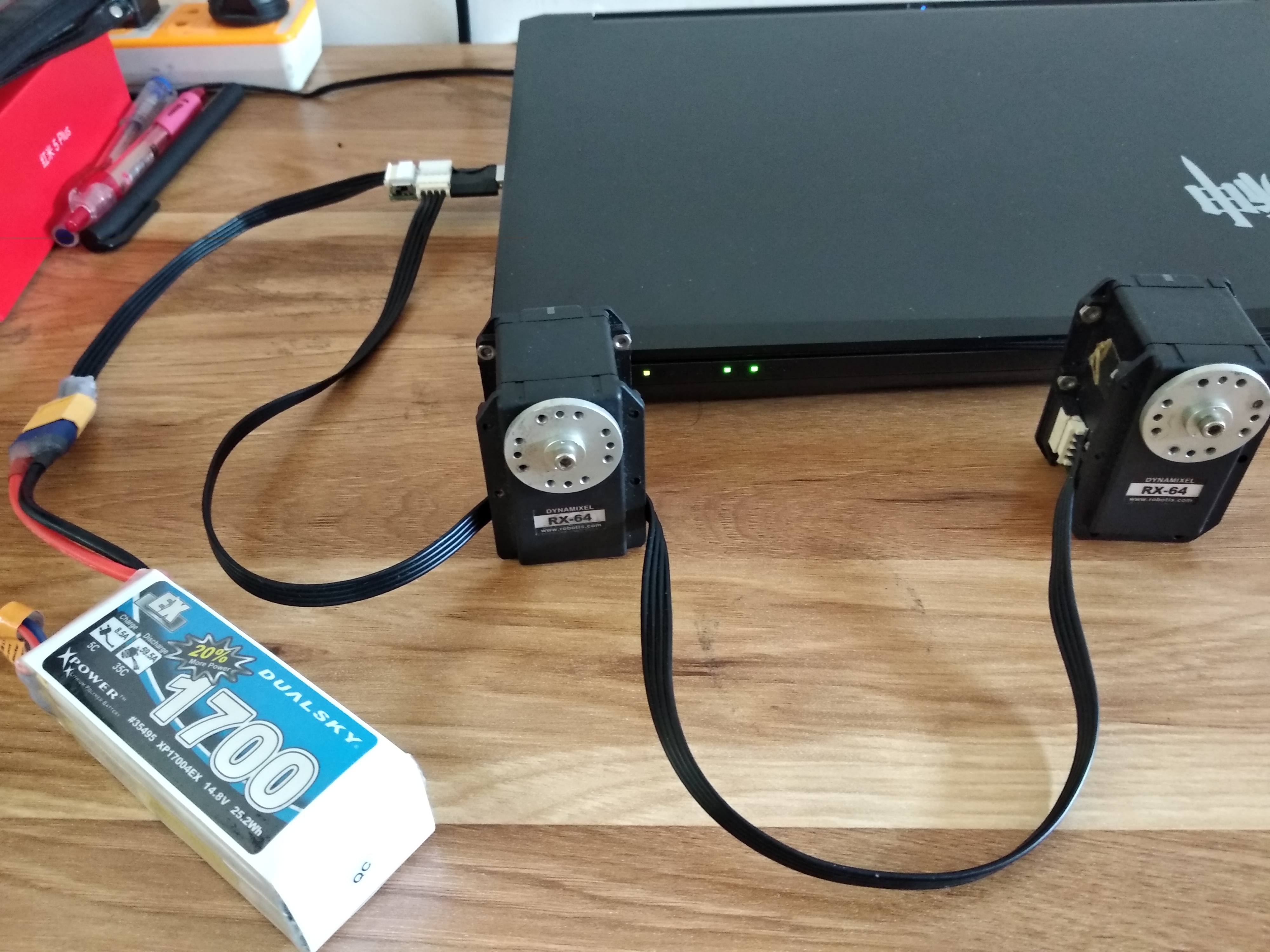

实现功能:用手转动一舵机到达某一角度,让另一个舵机也跟随其转到相应位置。
代码位于 rx64_read_write.m,代码中用到了控制表(Control Table),例如下面分别用到了 Torque Enable、Goal Position、Present Position 3个控制地址。
% 控制表地址
ADDR_MX_TORQUE_ENABLE = 24; % Torque Enable (24),0关1开
ADDR_MX_GOAL_POSITION = 30; % Goal Position (30), 0 ~ 1023,单位 0.29°
ADDR_MX_PRESENT_POSITION = 36; % Present Position (36), 0~1023,单位 0.29°