[2020.03~] 졸업프로젝트 - 붕괴 위기가 있는 건물에서의 조난자 탐색 로봇
◎ AI
★정원석
★김정환
◎ Embedded System
★권세진
★장성광


붕괴 위기가 있는 건물에서 사람이 직접 들어가는 것은 위험부담이 매우 크다.
이를 해결하기 위해 사람을 인식할 수 있는 로봇을 대신 진입시켜
건물 내를 꼼꼼히 탐색하고 조난자가 있는 위치를 맵에 표시하여
인명 구조 작업을 위한 정보 습득을 위해 사용한다.
-
lane tracking : 도로가 건물까지 이어져 있고 터틀봇은 도로를 따라 건물까지 도달한다.
-
exploration : 건물에 진입해 건물의 map 정보를 모두 얻을 수 있을 때까지 탐색한다.
-
recognition : 사람을 인식해 map에 표시한다.
-
navigation : 2~3 과정이 모두 끝나면 건물을 탈출한다.
-
로봇 : turtlebot3 burger
-
computing resource : nvidia jetson nano (터틀봇에 장착)
-
camera : 라즈베리파이용 webcam
-
-
commander
- computing resource : notebook
현재 필요한 mode를 받아와 해당 mode에 맞는 프로그램(Ros 패키지)을 실행시킵니다.

-
MODE_NONE : 아무런 동작을 하지 않습니다.
-
MODE_TRAFFIC_SIGN : 도로를 따라가는 모드
opencv/opencv.launch - by 정원석
이미지에서 차선을 인식하기 위한 노드입니다. 1. 카메라로부터 이미지를 받아온다 2. 이미지중 밑 부분만 잘라 사용 (차선이 잘 보이는) 3. 노란색만 인식 1. 이미지를 hsv로 컬러 변경 2. 노란색 영역만 표시( (20, 100, 10), (30, 255, 255) ) 4. 노란색만 인식된 이미지를 cv2.threshold, cv2.GaussianBlur, cv2.Canny를 통해 가공 5. cv2.HoughLinesP를 사용하여 파라미터 조정을 통해 차선 정보를 받아온다 6. 왼쪽 오른쪽 선을 구분하고 기울기를 받아와 차선 정보를 controller.launch로 넘겨준다traffic_robot_control/control.launch - by 장성광,정원석,김정환,권세진
opencv.launch로부터 받아온 차선의 정보를 활용하여 터틀봇이 도로를 따라갈 수 있도록 제어합니다. 차선의 기울기와 위치 정보를 기반으로 터틀봇의 회전속도와 전진속도를 결정합니다.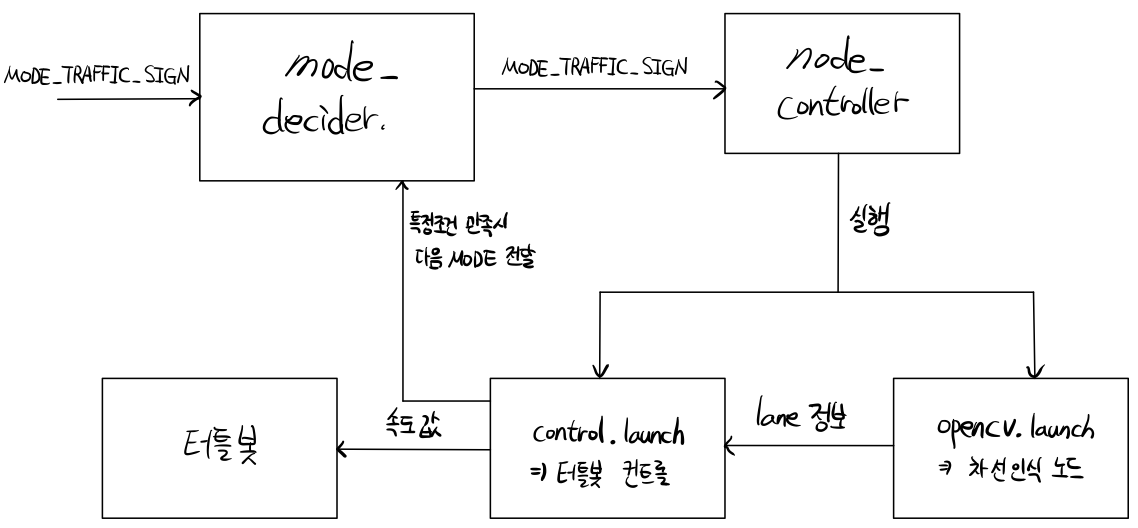
-
MODE_EXPLORATION : 건물 탐색 모드
turtlebot3_slam/turtlebot3_slam.launch - 라이브러리
frontier exploration 패키지를 이용하여 건물 내부를 모두 탐색합니다.person_filtering.launch - by 정원석
YOLO로부터 object인식 정보를 받아와 그 중 의미있는 정보(사람)만 필터링하여 exploration_save.launch 노드에 전달합니다.exploration_save/exploration_save.launch - by 권세진, 장성광
건물 내를 돌아다니며 얻은 유용한 정보를 기록하기 위한 노드입니다. 구체적인 기능은 다음과 같습니다. 1. 실행되자마자 처음 위치(건물 입구의 위치)와 건물 탐색이 종료되었을 때의 마지막 위치를 기록합니다. => navigation(탈출) 모드에서 활용됩니다. 2. person_filtering.launch 로부터 사람을 인식했다는 메세지를 받으면 실시간 맵에 조난자 발견 지점을 기록합니다. 3. 건물 탐색이 모두 완료되면 조난자 발견 지점이 표시된 맵을 이미지 파일로 저장합니다. 4. 모든 동작이 종료되면 다음 모드를 mode_decider에 전달합니다.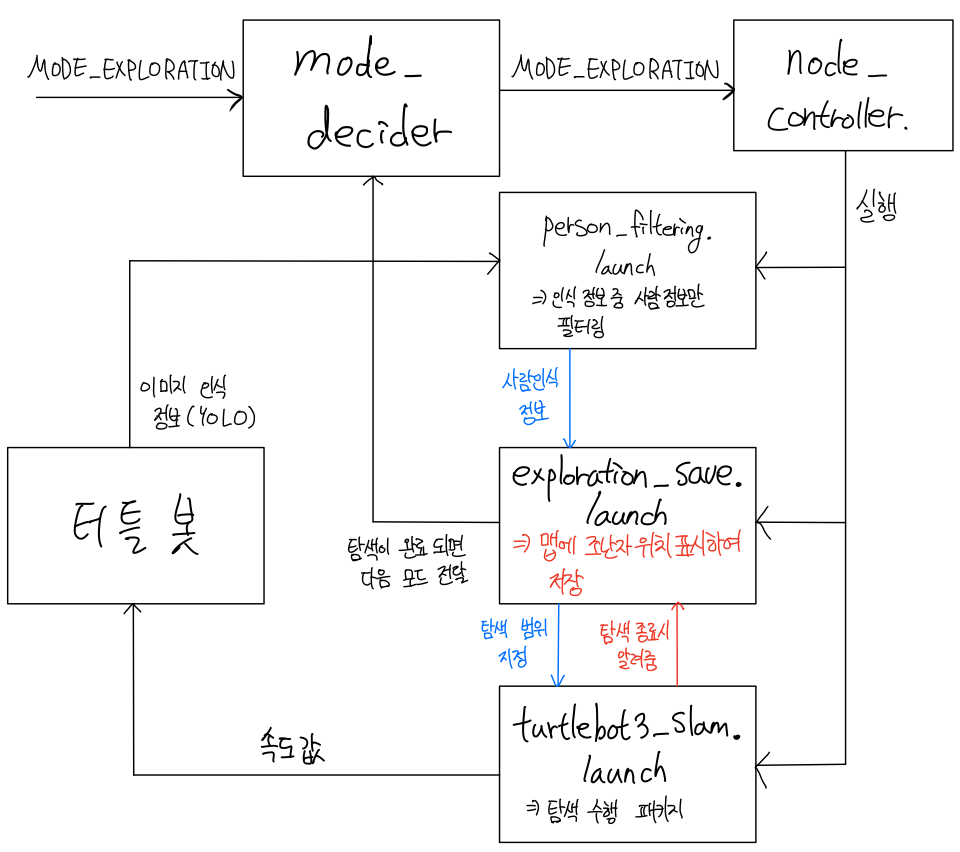
-
MODE_MAP_SAVE : 건물 탐색이 모두 끝나고 생성된 맵을 savemap.yaml 파일로 저장하는 모드입니다.
map_server/map_saver.launch - 라이브러리
만들어진 맵을 savemap.yaml 파일과 savemap.pgm 파일로 저장합니다.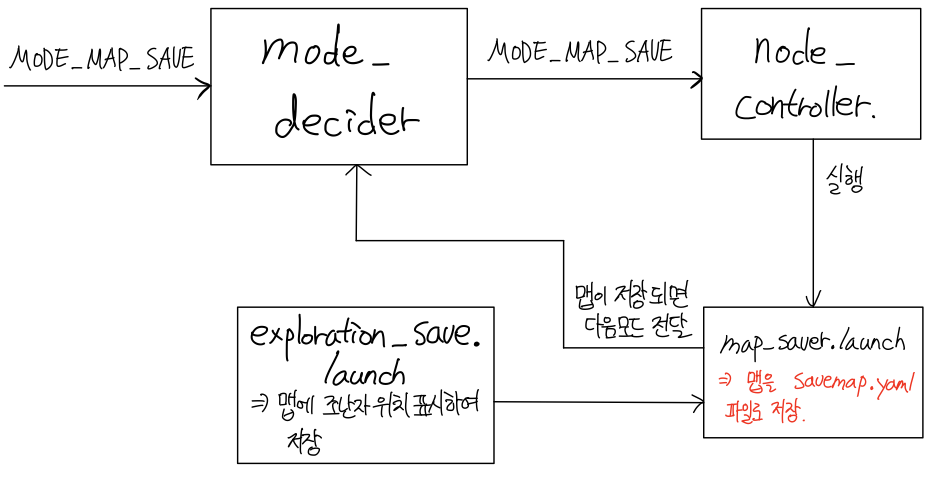
-
MODE_NAVIGATION : 건물 탈출 모드
turtlebot3_navigation.launch - 라이브러리
주변 맵 정보와 로봇의 현재 위치정보를 알고 있을 때, 목적지까지 경로를 안내해주는 패키지입니다. nav_control.launch에 의해 목적지가 설정됩니다.nav_control/nav_control.launch - by 권세진
turtlebot3_navigation.launch에 목적지를 전달합니다. 저희 프로젝트에서는 exploration 모드에서 기록한 건물 입구 위치가 목적지로 설정됩니다.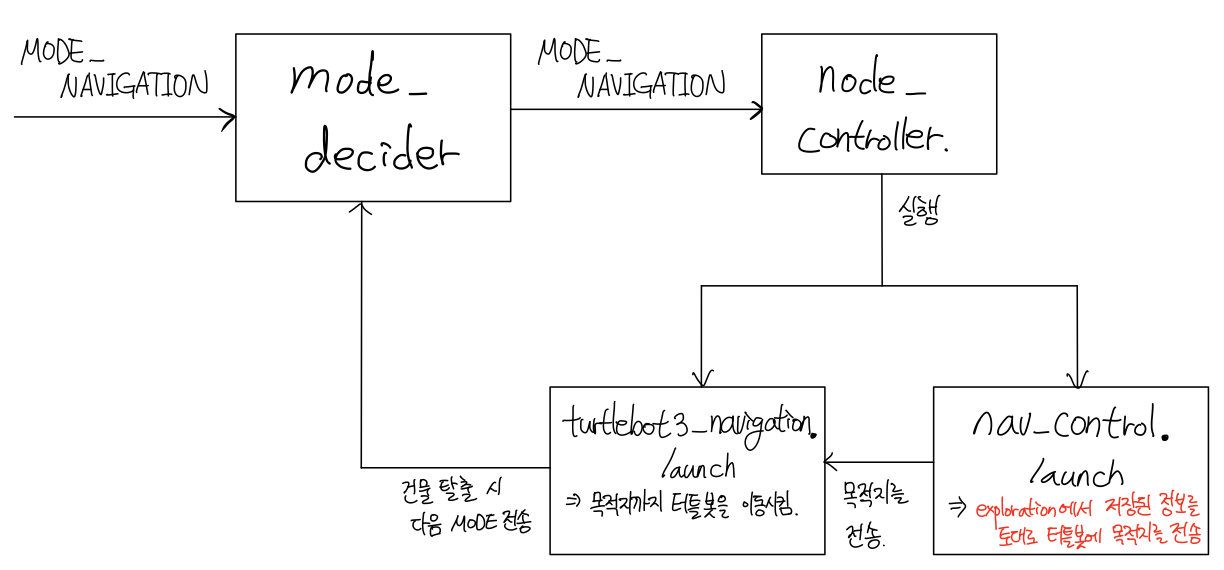




1. mode_decider.cpp - by 장성광, 권세진
들어온 모드 메세지를 확인하고 해당 모드로 바꿔도 문제가 없을 시 모드를 갱신합니다.
(현재는 모드 메세지가 들어오면 해당 모드로 바로 변경합니다.)
2. node_controller.cpp - by 장성광, 권세진
바뀐 모드가 필요로 하는 ros 패키지들을 실행시킵니다. launch 파일을 실행시키는 것이 원칙입니다.
2-1 cpp_roslaunch.cpp - by 권세진
코드로 roslaunch 명령을 실행하는 소스입니다.
핵심 함수 설명
1. void cpp_roslaunch::init()
cpp_roslaunch.cpp에 의해 실행된 모든 ros 패키지를 강제 종료시킵니다.
2. int cpp_roslaunch::kill_node(const char* node_name)
실행중인 패키지 중에 (node_name) 이름을 가진 패키지를 강제 종료합니다.
3. int cpp_roslaunch::roslaunch(const char* node_name,const char* launch_name)
(node_name) 이라는 패키지의 (launch_name) 파일을 roslaunch로 실행시킵니다.
4. void cpp_roslaunch::mychild(int sig)
예기치않게 종료되지 않고 남아있는 패키지들을 제거합니다.
