The old Linux kernel source version 0.11 and the integrated experiment environment.
CS630 Qemu Lab is a related project, it is a friendly learning environment for the X86 assembly course: CS630.
If you want to learn the latest Linux Kernel, please try our Linux Lab
-
Basic information
- Homepage: http://tinylab.org/linux-0.11-lab
- Repository: https://github.com/tinyclub/linux-0.11-lab
-
Features
- compilable with many different versions of Gcc.
- has been tested under modern Linux, Mac OS X and even work on Windows with Docker Toolbox.
- add bulit-in qemu and bochs support, include running and debugging.
- integrate different prebuilt rootfs (floopy, ramdisk and harddisk).
- allow to generate callgraph of every specified function
- a Dockerfile added to simplify this setup on other systems (e.g. Windows).
The docker install method is recommended for all systems, including Linux, Windows and Mac OS.
Here is the deprecated method:
-
The Linux distributions: debian and ubuntu (>= 14.04) are recommended
-
Install basic tools
$ sudo apt-get install vim cscope exuberant-ctags build-essential qemu lxterminal -
Optional
$ sudo apt-get install bochs vgabios bochsbios bochs-doc bochs-x libltdl7 bochs-sdl bochs-term $ sudo apt-get install graphviz cflow
$ cd src/
$ make help // get help
$ make // compile
$ make boot-hd // boot it on qemu with hard disk image
$ make boot-hd G=0 // Use curses based terminal instead of graphics, friendly for ssh login, exit with 'ESC+2'
$ QEMU_PREBUILT=0 make boot-hd // Don't use prebuilt qemu. latest qemu only boot with hd rootfs
$ make switch // switch to another emulator, between qemu and bochs
Switch to use emulator: bochs
$ make boot VM=qemu|bochs // specify the emulator, between qemu and bochs
// edit .kernel_gdbinit(for kernel.sym) and .boot_gdbinit(for bootsect.sym and setup.sym) before debugging
$ make debug-hd // debug kernel.sym via qemu and start gdb automatically to connect it.
$ make debug-hd DST=boot/bootsect.sym // debug bootsect, can not debug code after ljmp
$ make debug-hd DST=boot/setup.sym // debug setup, can not debug after ljmp
Note: A simpler method is using Docker Toolbox with our Dockerfile, see Build on the other systems
-
Install xcode from "App Store"
-
Install Mac package manage tool: MacPorts from http://www.macports.org/install.php
-
Check your OS X version from "About This Mac", for example, Lion
-
Go to the "Mac OS X Package (.pkg) Installer" part and download the corresponding version
-
Self update MacPorts
$ xcode-select --switch /Applications/Xcode.app/Contents/Developer $ sudo port -v selfupdate
-
-
Install cross compiler gcc and binutils
$ sudo port install i386-elf-binutils i386-elf-gcc -
Install qemu
$ sudo port install qemu -
Install graphviz and cflow
$ sudo port install GraphViz $ sudo port install cflow -
Install gdb. 'Cause port doesn't provide i386-elf-gdb, use the pre-compiled tools/mac/gdb.xz or download its source and compile it.
$ cd tools/mac/ ; tar Jxf gdb.xz
Optional
$ sudo port install cscope
$ sudo port install ctags
$ wget ftp://ftp.gnu.org/gnu/gdb/gdb-7.4.tar.bz2
$ tar -xzvf gdb-7.4.tar.bz2
$ cd gdb-7.4
$ ./configure --target=i386-elf
$ make
Same as Hack Linux-0.11 on Linux
If want to use this Lab on the other systems, such as Windows (and even Mac OS X), with the Dockerfile support, everything is simplified.
Only need to install the docker toolbox, which is a lightweight Linux distribution made specifically to run Docker containers, with this tool and our Dockerfile, we can simply build a Linux 0.11 Lab on every system.
-
Install Docker Toolbox and boot into it
- Linux and Mac OSX: Docker CE
- Windows: Docker Toolbox Installation
-
Choose a working directory
For the
defaultsystem on virtualbox installed by Docker Toolbox, please use/mnt/sda1instead of the default/root, otherwise, data will be lost.$ cd /mnt/sda1For Linux and Mac OSX, please simply choose one directory under
~/Documentsor~/Downloads.$ cd ~/Documents -
Build and Start the service
$ git clone https://github.com/tinyclub/cloud-lab.git $ cd cloud-lab/ && tools/docker/choose linux-0.11-lab $ tools/docker/run -
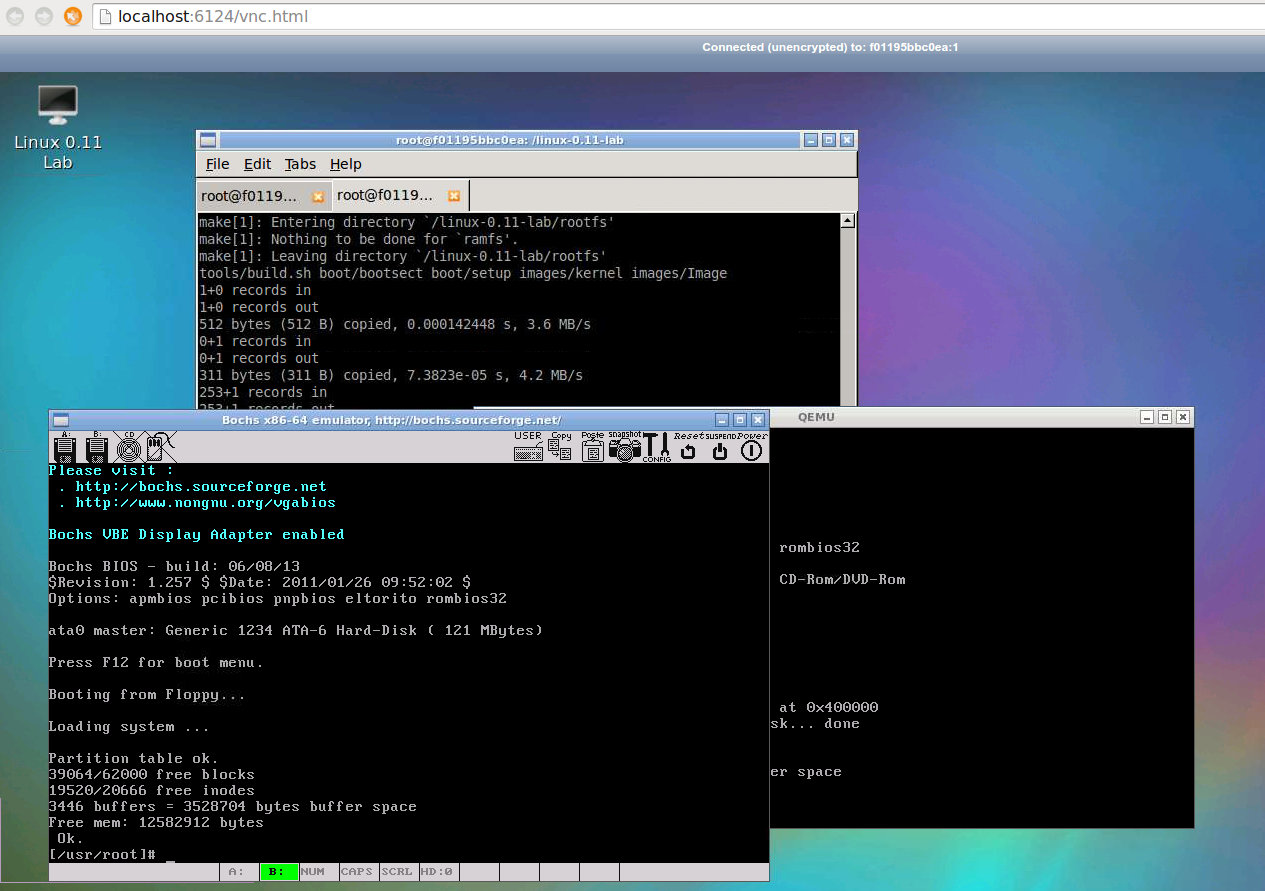
The above command will start a VNC page, login with the password printed in the console
Notes:
In order to run docker without password, please make sure your user is added in the docker group:
$ sudo usermod -aG docker $USER
In order to speedup docker images downloading, please configure a local docker mirror in /etc/default/docker, for example:
$ grep registry-mirror /etc/default/docker
DOCKER_OPTS="$DOCKER_OPTS --registry-mirror=https://docker.mirrors.ustc.edu.cn"
$ service docker restart
In order to avoid network ip address conflict, please try following changes and restart docker:
$ grep bip /etc/default/docker
DOCKER_OPTS="$DOCKER_OPTS --bip=10.66.0.10/16"
$ service docker restart
If the above changes not work, try something as following:
$ grep dockerd /lib/systemd/system/docker.service
ExecStart=/usr/bin/dockerd -H fd:// --bip=10.66.0.10/16 --registry-mirror=https://docker.mirrors.ustc.edu.cn
$ service docker restart
Same as Hack Linux-0.11 on Linux
Three different root filesystem images are stored in rootfs/:
- rootram.img -- RAM image
- rootimage -- Floppy image
- hdc-0.11.img-- Harddisk image
rootram.img is mountable directly:
$ mkdir /path/to/rootram/
$ sudo mount rootfs/rootram.img /path/to/rootram/
A new target ramfs-install is added to install files from examples/ to ramfs.
$ make ramfs-install
rootimage-0.11 is a minix filesystem, must with -t minix obviously:
$ sudo mkdir /path/to/rootimage/
$ sudo mount -t minix rootfs/rootimage-0.11 /path/to/rootimage
A new target flp-install is added to install files from examples/ to floppy image.
$ make flp-install
hdc-0.11.img has a partition table, should be mounted with an offset:
$ mkdir /path/to/hdc/
$ fdisk -lu rootfs/hdc-0.11.img
$ fdisk -l rootfs/hdc-0.11.img
Disk rootfs/hdc-0.11.img: 127 MB, 127631360 bytes
16 heads, 38 sectors/track, 410 cylinders, total 249280 sectors
Units = sectors of 1 * 512 = 512 bytes
Sector size (logical/physical): 512 bytes / 512 bytes
I/O size (minimum/optimal): 512 bytes / 512 bytes
Disk identifier: 0x00000000
Device Boot Start End Blocks Id System
rootfs/hdc-0.11.img1 2 124031 62015 81 Minix / old Linux
rootfs/hdc-0.11.img2 124032 248063 62016 81 Minix / old Linux
$ sudo mount -o offset=$((2*512)) rootfs/hdc-0.11.img /path/to/hdc/
A new target hda-install is added to install files from examples/ to harddisk image.
$ make hda-install
Some examples are stored in examples/ with their own README.md:
A new demonstration is added: Linux 0.11 Lab: Add a new syscall into Linux 0.11
Host:
$ patch -p1 < examples/syscall/syscall.patch
$ make start-hd
Emulator:
$ cd examples/syscall/
$ make
as -o syscall.o syscall.s
ld -o syscall syscall.o
./syscall
Hello, Linux 0.11
-
2015-03-15, falcon wuzhangjin@gmail.com
- launch a linux-0.11-lab project, see http://tinylab.org/linux-0.11-lab
- integrate prebuilt rootfs images, no need to install extra images
- integrate both qemu and bochs support and simplify the testing on emulators
- add callgraph generation support
- add docker support, allow to build the whole lab with one command
- rewrite the document: README.md
- Fix up "Reset-floppy Called"
- clean up everything
- repo: https://github.com/tinyclub/linux-0.11-lab
-
2012-04-30, yuanxinyu yuanxinyu.hangzhou@gmail.com
- add Mac OS X support
- add latest Gcc support
- repo: https://github.com/yuanxinyu/Linux-0.11
-
2011-07-31, tigercn moonlight.yang@gmail.com
- port to new system and gcc
- see: http://www.oldlinux.org/oldlinux/viewthread.php?tid=13681
-
2008-10-15, falcon wuzhangjin@gmail.com
- add gcc 4.3.2 with 32/64bit host support
- rewrite boot/{bootsect.s,setup.s} with AT&T
- replace tools/build.c with tools/build.sh
- see: http://www.oldlinux.org/oldlinux/viewthread.php?tid=11651&extra=page%3D1
-
2005, jiong.zhao gohigh@sh163.net
- write a book for Linux 0.11
- release a version for RedHat 9 with rootfs, compilers and blabla
- site: http://www.oldlinux.org
-
1991, Linus
- write and release the original Linux 0.11.