项目文档:https://mickrobot.github.io/
代码默认的分支master分支适用于四轮差速小车,X4分支为第一版小车代码分支。 M4分支为麦克纳姆轮第一版小车代码分支。小车的PCB、代码及3D图纸均是开源,大家可以自行下载打样学习。注意:新开源的电源板和控制板仅供大家自己打样学习用,切勿用于商业用途。有问题可联系 cenruping@vip.qq.com
欢迎加QQ群讨论 1149897304 (开源ROS自主导航小车)
项目合作请联系(cenruping@vip.qq.com)可以代为开发线控底盘或针对已有的小车底盘设计控制器。
目录说明
STM32_Code:存放小车上嵌入式控制板的代码文件
3D_Model_xxx:存放小车3D模型文件
PCB_File:存放小车上所用PCB文件
Reference_Documents:存放相关的传感器的使用手册等
2022-4-20
1、增加了对SBUS控制信号的解码程序,支持SBUS遥控器
2、对代码增加了注释,
2021-4-18
1、开源了小车的电源板和小车控制板
2、将DBUS、上位机发送的命令移到中断函数中进行处理
3、将PID相关计算函数移到PID.c中
4、添加MPU9250 读取和姿态计算函数
2020-9-8
1、更新了DBUS中的函数名称
2、更新遥控器信号丢失造成的数据乱码引起“疯转”的问题
3、统一4轮和2轮差速小车模型电机控制函数的单位为 m/s 和 rad/s
2019-10-07
1、添加ROS节点下发命令清零里程计数据功能
2020-9-9
1、更新MickM4 麦克纳姆轮底盘的代码
MickX4分支为四轮差速小车分支
git clone -b MickX4 https://github.com/RuPingCen/mick_robot_chasiss.git
操作说明:以大疆遥控器为例,左上角开关S1为使能选择,S1开关置于最上为不使能遥控器(此时由上位机控制),S1开关拨到最下为使能遥控器;右上角开关S2为速度选择开关,上中下对应 1,2,3个档位,1档速度最大值为 1m/s,2档速度最大值为2m/s,3档最大速度为3.5m/s。
中文博客:https://rupingcen.blog.csdn.net/article/details/117257934
通讯协议的接口说明请参考链接: 【腾讯文档】ROS底盘数据帧协议v1.1 https://docs.qq.com/sheet/DV2hmSEdSYVVtclB4
MickM4分支为麦克纳姆轮ROS底盘的底盘控制程序,代码适用于STM32F103及C620电调
更多的信息可以参考博客地址:https://blog.csdn.net/crp997576280/article/details/102026459
git clone -b MickM4 https://github.com/RuPingCen/mick_robot_chasiss.git
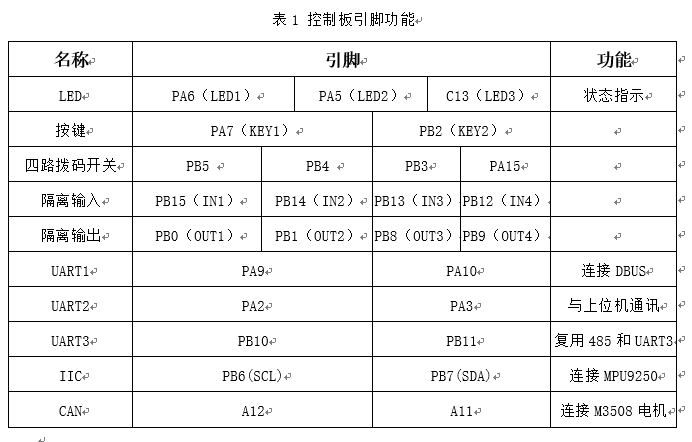
控制板输入20-36V DC直流,对外提供1路DC 5V 2A 、1路DC 12V 2A 对车载传感器供电。
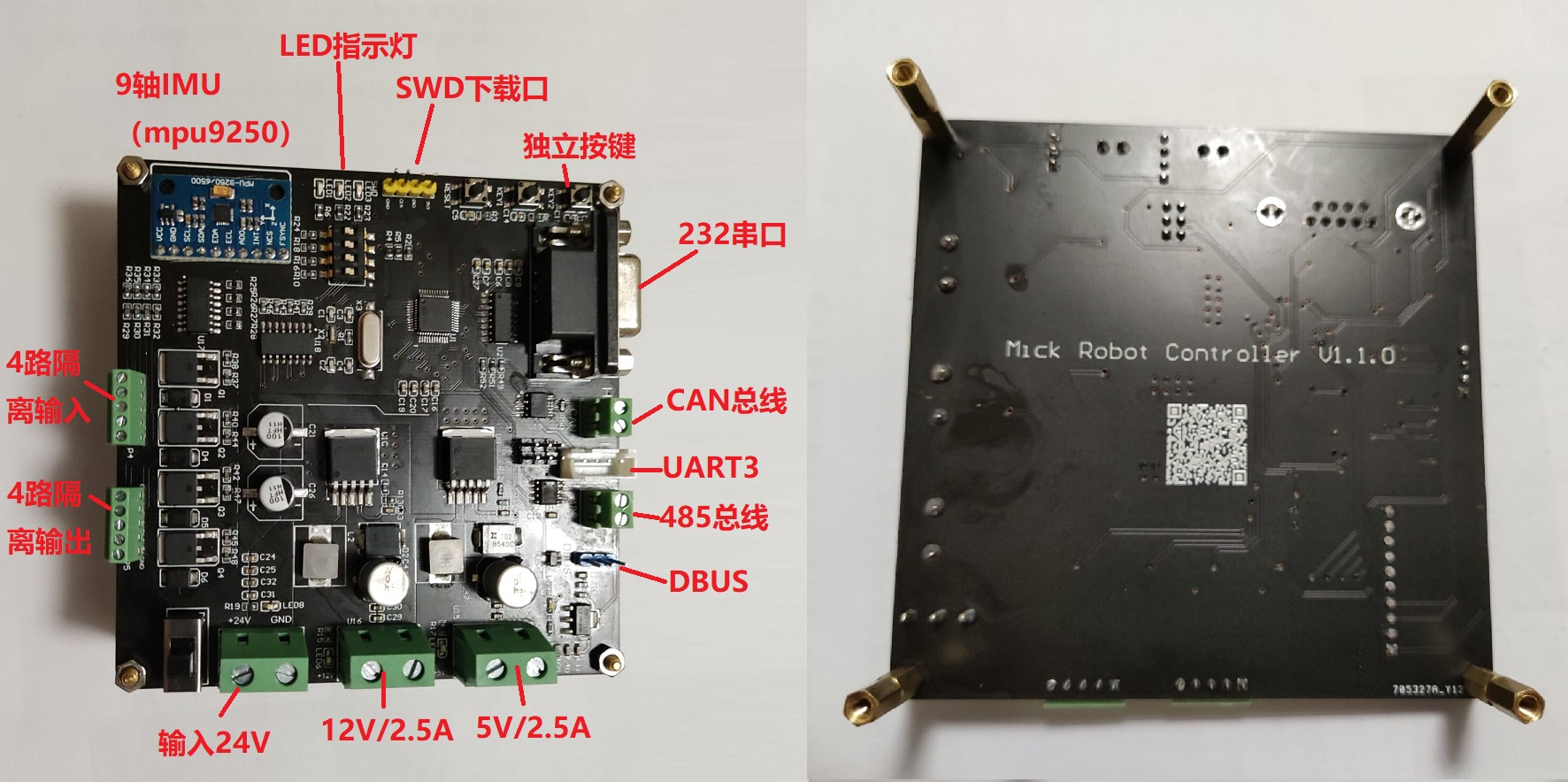
提供1路DBUS接口、1路232接口、1路CAN总线、1路485接口、1路UART3接口(与485复用)、1路IIC。其中DBUS被用来接收遥航模遥控器的数据,232接口负责与上位机ROS通讯。CAN总线连接4个M3508电机。IIC连接板子上安装的MPU9250。485接口和UART3接口复用,可扩展其他传感器模块。 3路LED指示灯用于显示程序状态。2路按键、4路拨码开关用于调试和选择程序功能。4路隔离输入(输入电压范围12-24V)。4路隔离输出(输出高阻态和GND,承受电流2A)。
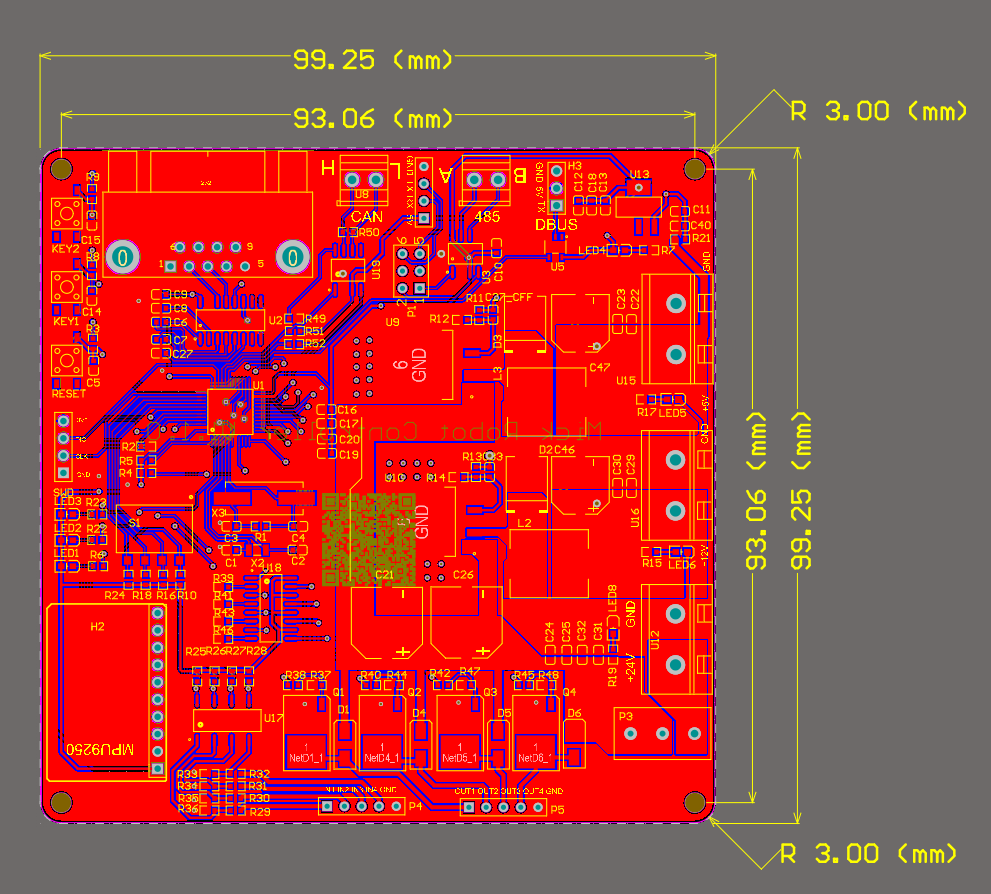
板子外形为99*99 mm 安装孔位于四周呈轴对称分布,孔中心间距为93mm,孔直径为φ3.1 mm。如图5所示。
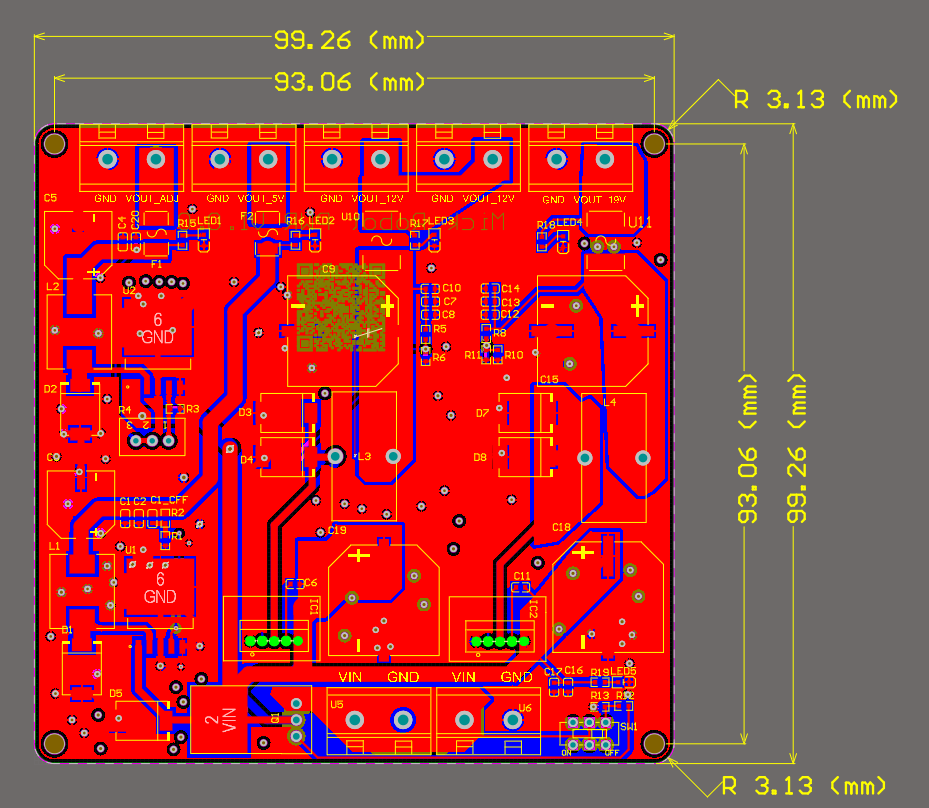
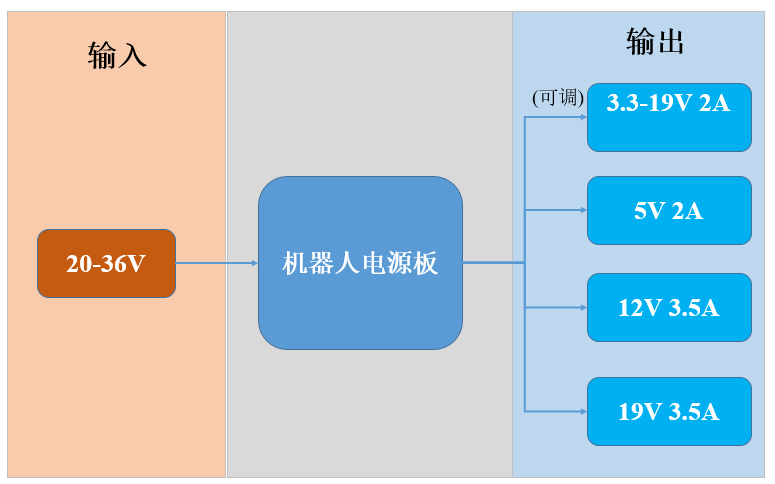
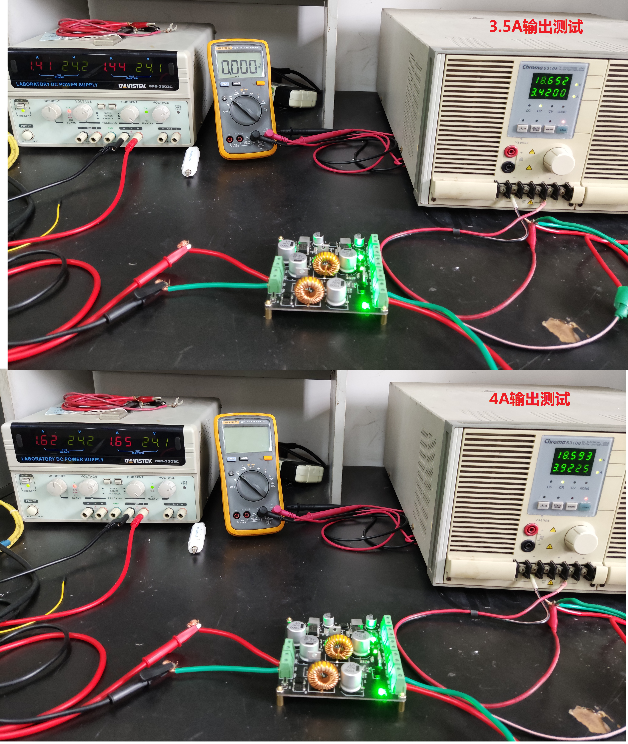
如下图所示,电源板输入20-36V DC直流,输出1路DC 5V 2A 、1路DC 3.3-19V 2A 可调电源 、1路DC 12V 3.5A、1路DC 19V 3.5A,可满足对工控机和自主导航小车车载传感器供电需求。
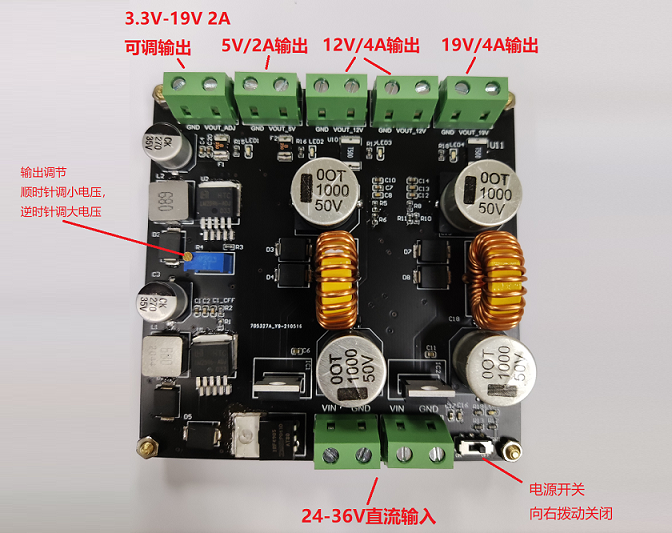
经过电子负载实际测试,5V和3.3V-19V 采用LM2596S方案,每一路可实现2A的稳定输出,加装散热片以后可实现2.5A长时间输出。
12V 在电子负载实测中可以达到长时间稳定输出3.5A 输出,加装扇热片以后可以实现4A长时间输出,短时可达4.5A。
19V在电子负载实测中可以达到长时间稳定输出3.5A 输出,加装扇热片以后可以实现4A长时间输出,短时可达4.5A,如下图所示。
板子外形为99*99 mm 安装孔位于四周呈轴对称分布,孔中心间距为93mm,孔直径为φ3.1 mm。如图6所示。