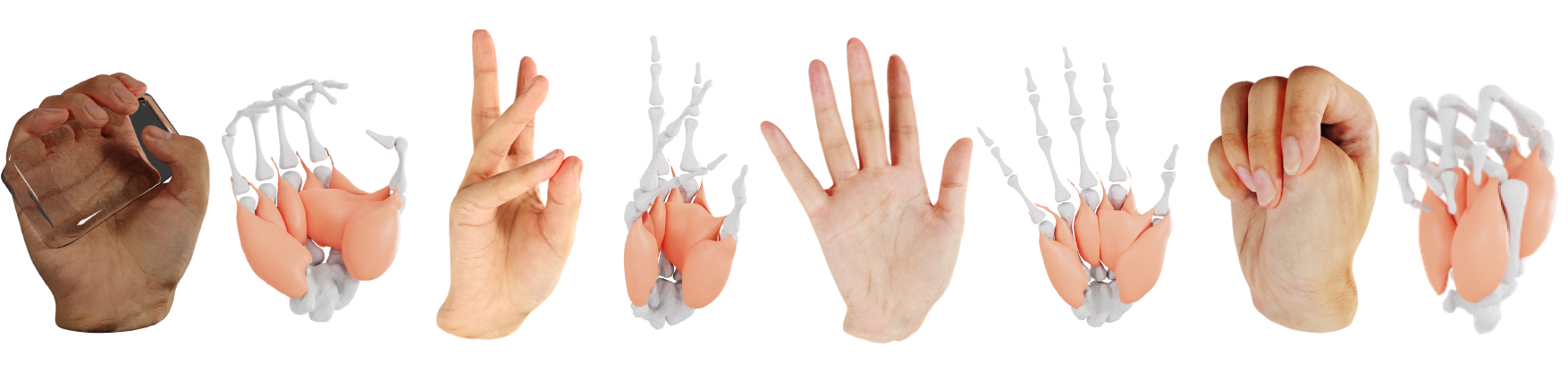
We present NIMBLE, a non-rigid parametric hand model that includes bones and muscles, bringing 3D hand model to a new level of realism. By enforcing the inner bones and muscles to match anatomic and kinematic rules, NIMBLE can animate 3D hands to new poses at unprecedented realism.
To learn about NIMBLE, please visit our website: https://liyuwei.cc/proj/nimble
You can find the NIMBLE paper at: https://arxiv.org/abs/2202.04533
- numpy
- Pytorch
- Pytorch3d
- opencv-python
- trimesh (with pyembree for faster collision detection)
- Download model files from here.
python demo.py- Render in
assets/render.blend- Scale down the meshes and manually assign texture images.
- Select
non-colorfor color space of normal and specular textures.
- Use
handle_collision=Trueto make sure skin is always outside muscle. Otherwise, skin and muscle might collide.
This model and code was developped and used for the paper NIMBLE: A Non-rigid Hand Model with Bones and Muscles for SIGGRAPH22. See project page.
It reuses part of the great code from manopth by Yana Hasson, pytorch_HMR by Zhang Xiong and SMPLX by Vassilis Choutas!
If you find this code useful for your research, consider citing:
@article{10.1145/3528223.3530079,
author = {Li, Yuwei and Zhang, Longwen and Qiu, Zesong and Jiang,
Yingwenqi and Li, Nianyi and Ma, Yuexin and Zhang, Yuyao and
Xu, Lan and Yu, Jingyi},
title = {NIMBLE: A Non-Rigid Hand Model with Bones and Muscles},
year = {2022},
issue_date = {July 2022},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {41},
number = {4},
issn = {0730-0301},
url = {https://doi.org/10.1145/3528223.3530079},
doi = {10.1145/3528223.3530079},
journal = {ACM Trans. Graph.},
month = {jul},
articleno = {120},
numpages = {16}
}