

ROS package for visualizing a robot's reachability and base placement maps
-
Currently supports ROS melodic and Ubuntu 18 (although porting to ROS noetic and Ubuntu 20 should not be difficult).
-
To generate the reachability maps, have a look at the sampled_reachability_maps (github.com/iROSA-lab/sampled_reachability_maps) repository.
-
This repository is a part of the codebase of the paper: Robot Learning of Mobile Manipulation With Reachability Behavior Priors [1] [Paper] [Project site]
-
The code is based on the workspace_visualization package of the reuleaux repository (github.com/ros-industrial-consortium/reuleaux). Please refer to wiki.ros.org/reuleaux for more information.
-
Build this package in your ROS workspace and source the
devel/setup.bashfile -
Load the reachability/base_placement map by running (for example)
rosrun reachability_map_visualizer load_reachability_map $(rospack find reachability_map_visualizer)/maps/3D_reachability_map_arm_left_tool_link_0.05_2022.h5 -
Run
rvizand in the 'Displays' panel click on 'Add'. Choose 'By display type' and select the ReachabilityMap option under the 'reachability_map_visualizer' folder. To run our example rviz config, use:rosrun rviz rviz -d $(rospack find reachability_map_visualizer)/rviz/reachability_map.rviz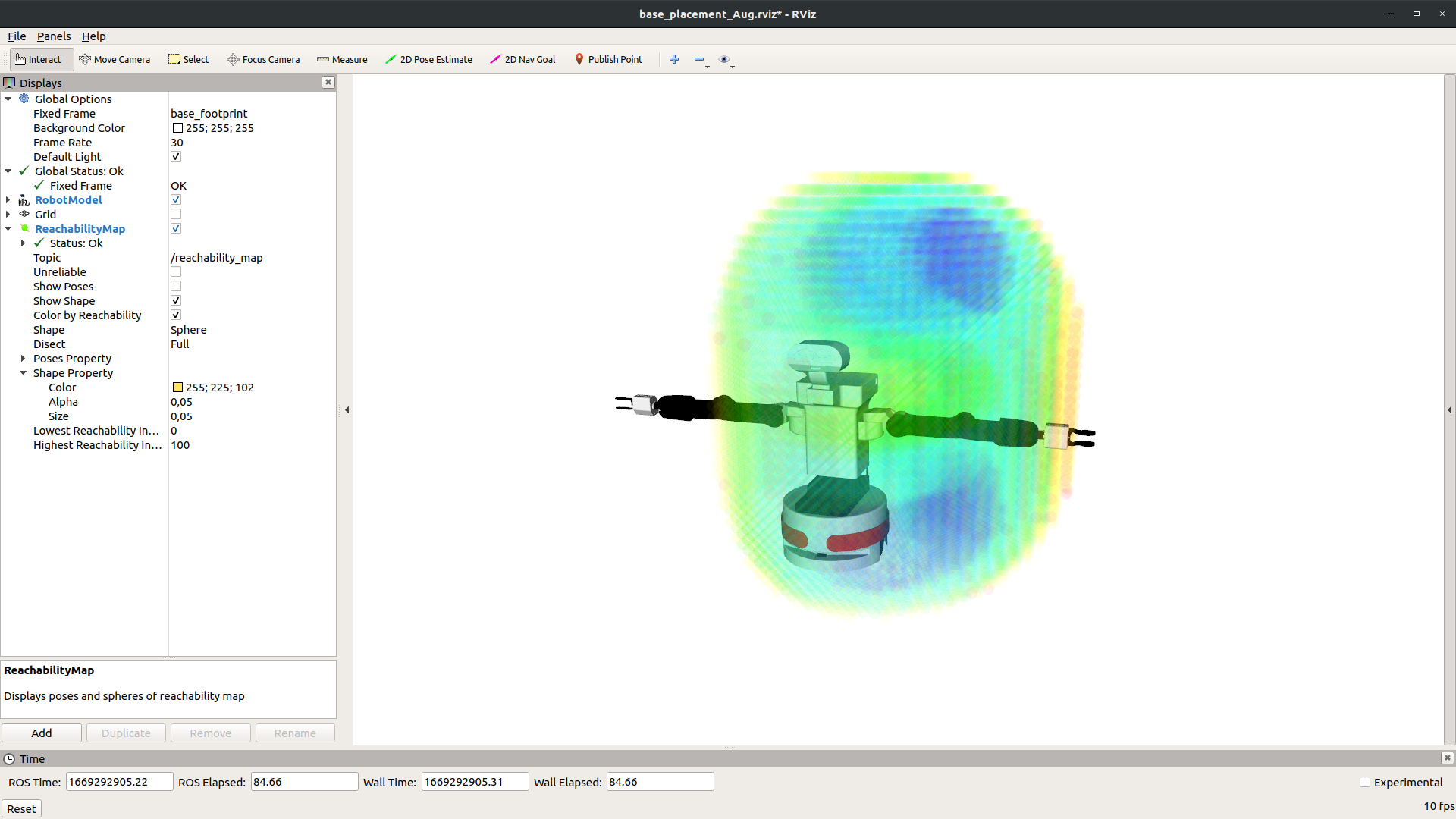
-
You can play with the visualization settings in Rviz:
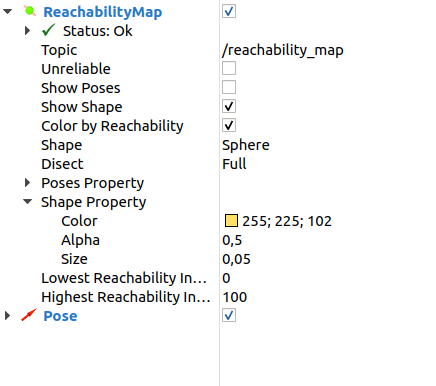
-
The voxel coloring scheme can be changed by editing the "ReachMapVisual::setColorSpherebyRI" function in the "reachability_map_visual "file. By default, dark blue denotes the highest reachability while red denotes the lowest.


[1] S. Jauhri, J. Peters and G. Chalvatzaki, "Robot Learning of Mobile Manipulation With Reachability Behavior Priors", https://doi.org/10.1109/LRA.2022.3188109