SqueezeSeg: Convolutional Neural Nets with Recurrent CRF for Real-Time Road-Object Segmentation from 3D LiDAR Point Cloud
By Bichen Wu, Alvin Wan, Xiangyu Yue, Kurt Keutzer (UC Berkeley)
This repository contains a tensorflow implementation of SqueezeSeg, a convolutional neural network model for LiDAR segmentation. A demonstration of SqueezeSeg can be found below:

Please refer to our video for a high level introduction of this work: https://youtu.be/Xyn5Zd3lm6s. For more details, please refer to our paper: https://arxiv.org/abs/1710.07368. If you find this work useful for your research, please consider citing:
@article{wu2017squeezeseg,
title={Squeezeseg: Convolutional neural nets with recurrent crf for real-time road-object segmentation from 3d lidar point cloud},
author={Wu, Bichen and Wan, Alvin and Yue, Xiangyu and Keutzer, Kurt},
journal={arXiv preprint arXiv:1710.07368},
year={2017}
}License
SqueezeSeg is released under the BSD license (See LICENSE for details). The dataset used for training, evaluation, and demostration of SqueezeSeg is modified from KITTI raw dataset. For your convenience, we provide links to download the converted dataset, which is distrubited under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 License.
Installation:
The instructions are tested on Ubuntu 16.04 with python 2.7 and tensorflow 1.0 with GPU support (CUDA 8.0 and cuDNN 5.1).
-
Clone the SqueezeSeg repository:
$ git clone https://github.com/BichenWuUCB/SqueezeSeg.git
We name the root directory as
$SQSG_ROOT. -
Setup virtual environment:
-
By default we use Python2.7. Create the virtual environment
$ virtualenv env
-
Activate the virtual environment
$ source env/bin/activate -
[option] I recommend to use
virtualenvwrapper$ pip install virtualenvwrapper # configure virtualenvwrapper $ mkdir $HOME/.local/virtualenvs # append contents in `~/.bashrc` $ sudo vim ~/.bashrc # always use pip/distribute export VIRTUALENV_USE_DISTRIBUTE=1 # directory to store all virtual environment export WORKON_HOME=$HOME/.local/virtualenvs if [ -e $HOME/.local/bin/virtualenvwrapper.sh ]; then source $HOME/.local/bin/virtualenvwrapper.sh else if [ -e /usr/local/bin/virtualenvwrapper.sh ]; then source /usr/local/bin/virtualenvwrapper.sh fi export PIP_VIRTUALENV_BASE=$WORKON_HOME export PIP_RESPECT_VIRTUALENV=true # enable virtualenvwrapper $ source ~/.bashrc # create virtual environment with python2.7 and tensorflow 1.0.0 $ mkvirtualenv -p /usr/bin/python2.7 python1.0.0
-
-
Use pip to install required Python packages:
$ workon python1.0.0 (python1.0.0) $ pip install -r requirements.txt
Demo:
- To run the demo script:
If the installation is correct, the detector should write the detection results as well as 2D label maps to
$ cd $SQSG_ROOT/ $ workon python1.0.0 (python1.0.0) $ python ./src/demo.py
$SQSG_ROOT/data/samples_out. Here are examples of the output label map overlaped with the projected LiDAR signal. Green masks indicate clusters corresponding to cars and blue masks indicate cyclists.

Training/Validation
-
First, download training and validation data (3.9 GB) from this link. This dataset contains LiDAR point-cloud projected to a 2D spherical surface. Refer to our paper for details of the data conversion procedure. This dataset is converted from KITTI raw dataset and is distrubited under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 License.
$ cd $SQSG_ROOT/data/ $ wget https://www.dropbox.com/s/pnzgcitvppmwfuf/lidar_2d.tgz $ tar -xzvf lidar_2d.tgz $ rm lidar_2d.tgz
-
Now we can start training by
$ cd $SQSG_ROOT/ $ workon python1.0.0 (python1.0.0) $ ./scripts/train.sh -gpu 0 -image_set train -log_dir ./log/
Training logs and model checkpoints will be saved in the log directory.
-
We can launch evaluation script simutaneously with training
$ cd $SQSG_ROOT/ $ workon python1.0.0 (python1.0.0) $ ./scripts/eval.sh -gpu 1 -image_set val -log_dir ./log/
-
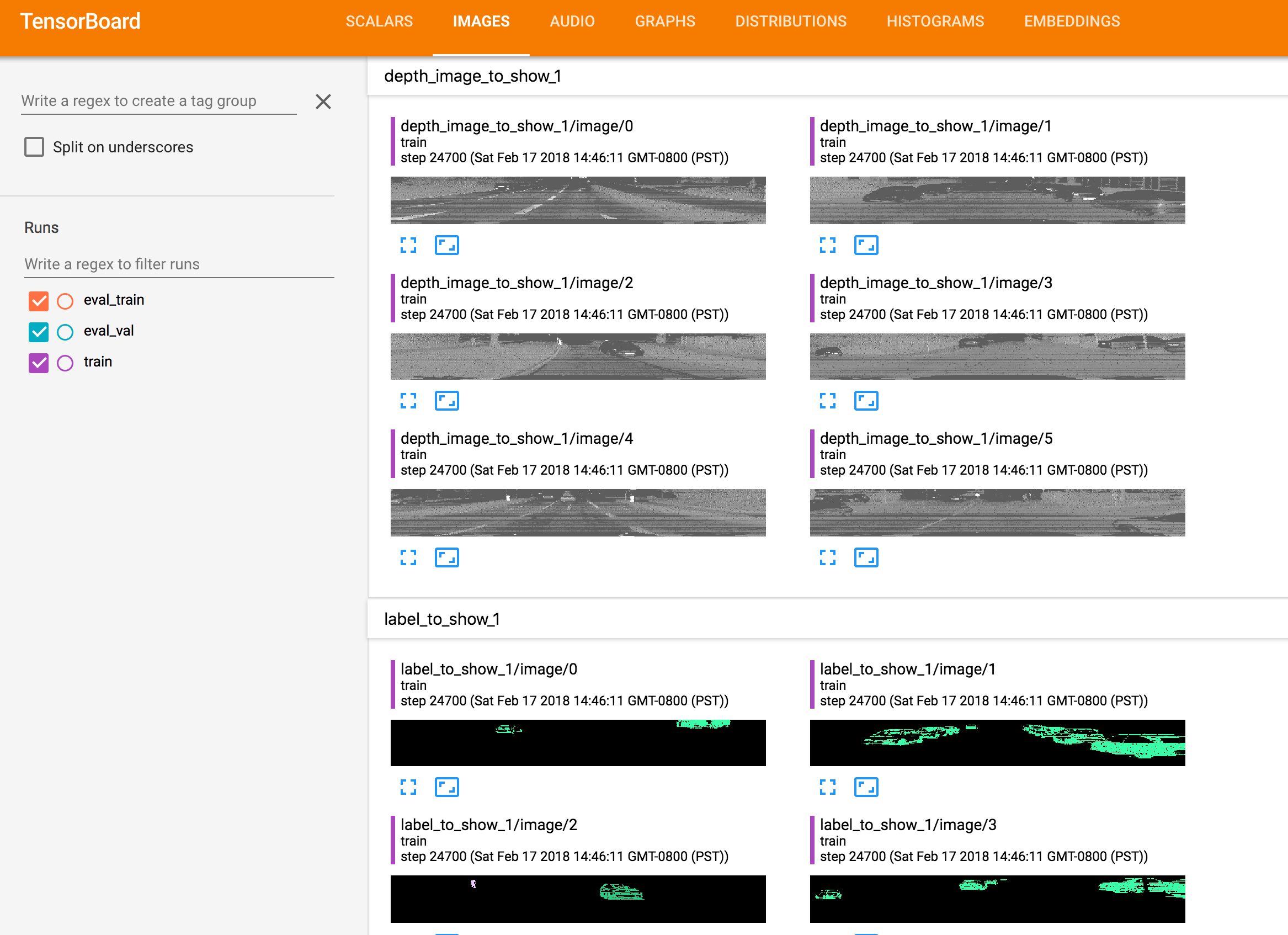
We can monitor the training process using tensorboard.
(python1.0.0) $ tensorboard --logdir=$SQSG_ROOT/log/Tensorboard displays information such as training loss, evaluation accuracy, visualization of detection results in the training process, which are helpful for debugging and tunning models, as shown below:



ROS
- Training dataset visualization
- quick start
$ ./scripts/quickstart.sh Usage: ./scripts/quickstart.sh [options] options: -h, --help show brief help -rviz_cfg rviz configure file. $ ./scripts/npy_player.sh -data_dir ./data/lidar_2d - safely quit
$ ./scripts/killall.sh

- Online point cloud segmentation
$ ./scripts/killall.sh
$ ./scripts/online.sh -h
Usage: ./scripts/online.sh [options]
options:
-h, --help show brief help
-sub_topic subscribe point cloud topic, default '/kitti/points_raw'.
# start online segmentation node
$ ./scripts/online.sh
# start any node you have to publish point cloud in "sub_topic"
