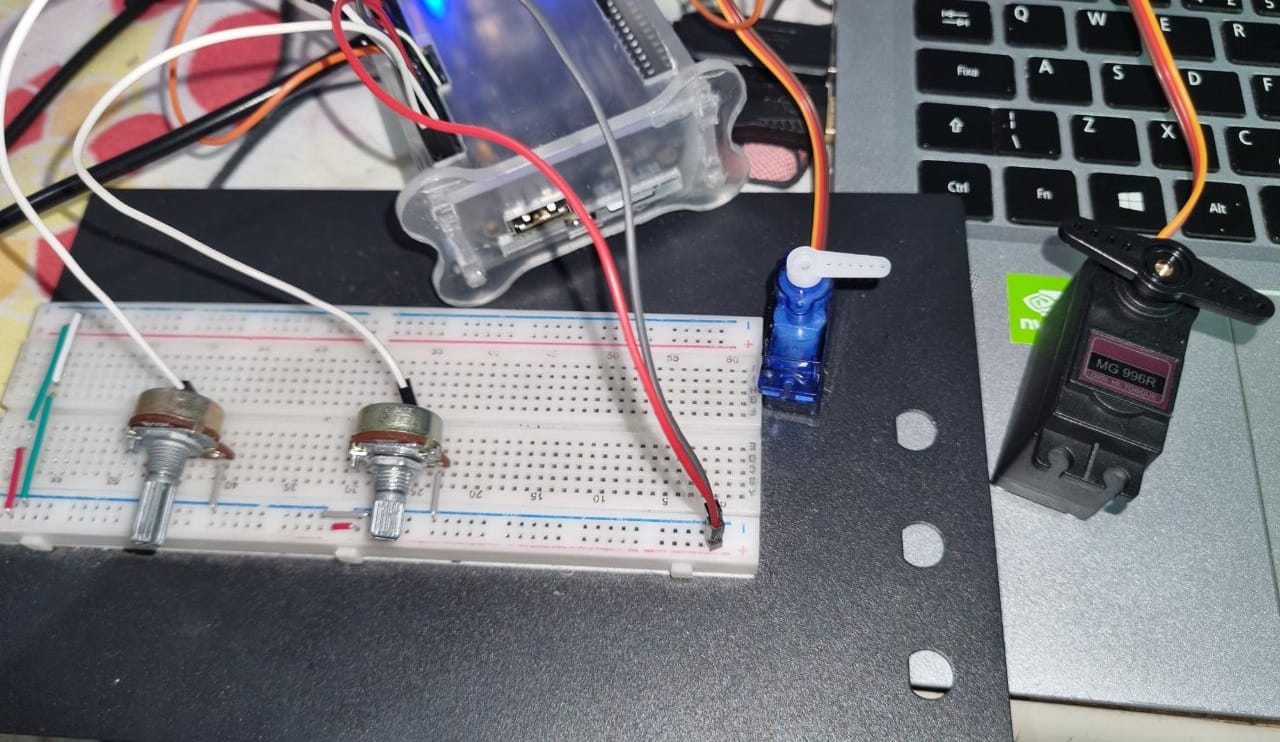
A ideia principal era tentar reproduzir um mini guincho fazendo o controle de dois servo-motor de forma concorrente, a partir da leitura do pino analógico da beaglebone.
-
Beaglebone Black;
-
Linguagem C, fazendo uso da biblioteca Pthread;
-
Linaro GCC (cross-toolchain);
-
Sistema de arquivo personalizado (criação via Buildroot)
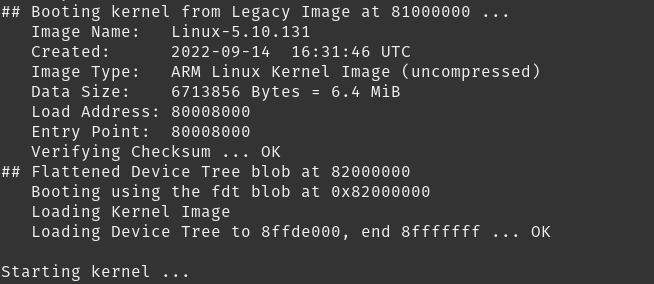
U-boot info Kernel info 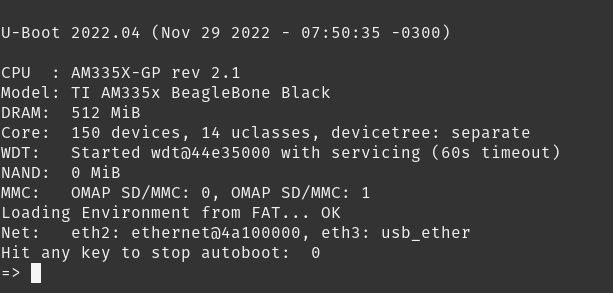
- Inclusão externa de overlays PWM e ADC;




makemake clean