





Distributed software system for a differentiated waste disposal service. The project had been developed for the course of Software Systems Engineering M of the University of Bologna, using the SCRUM agile framework.

Complete demo video
The project consists of different elements:
| Name | Description | Demo |
|---|---|---|
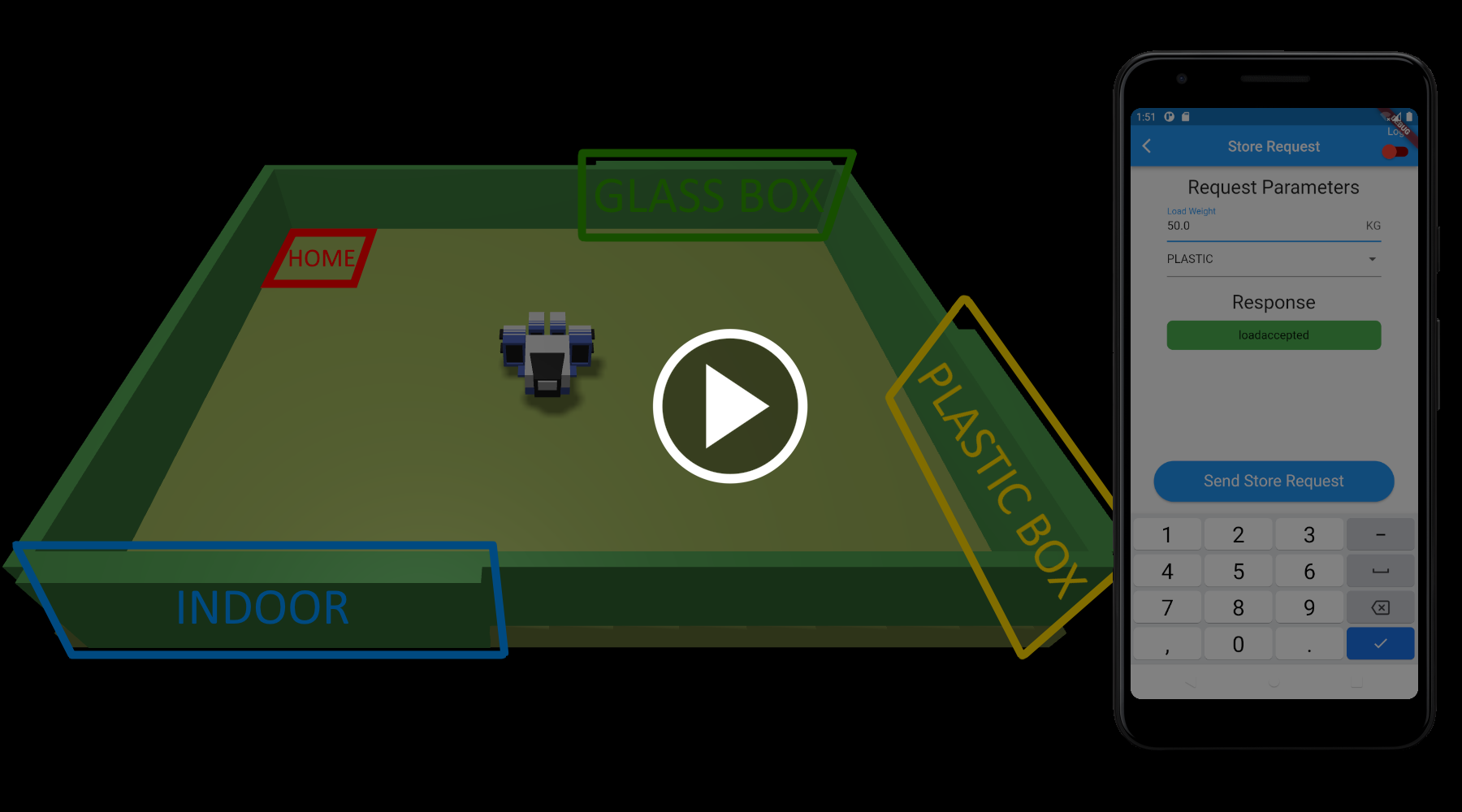
| Smart Device | Mobile application that allows a Waste Truck driver to send a StoreRequest to the Waste Service, specifying the X amount (kg) of Y type (glass or plastic) of waste they want to deposit. |  |
| Virtual Robot | Web application provided by the customer that simulates a Robot. The robot is confined in a virtual environment (a rectangular room) and can receive commands to perform some actions, such as moving forward/backwards both for a certain amount of time or by steps equal to its length, and to rotate. |  |
| Mapper QAK22 | Software provided by the customer that exploits Planner functions to map the room in which the robot is located (moving it by steps), and outputs a grid representation file; |  |
| Map Editor | Desktop graphical application that allows the user to load a map representation and to create a map configuration file by dragging and dropping the room tiles (Home, Indoor, PlasticBox, etc.) |  |
| Waste Service Core | Main component of the system. It loads a map configuration and manages the Waste Service. It receives Store Requests from the Smart Devices, process them and delegates a Transport Trolley for the waste pick up and dump, in case there is enough space in the requested container. |  |
| Waste Service RPi | Component that can run on a Raspberry Pi or on a desktop node (simulated). It implements an alarm/warning device: when a ultrasonic sonar (or some distance provider, e.g. the simulator) detects a distance that is lower/greater than a threshold, it sends an event to the system, that will stop/resume the Transport Trolley activity; Waste Service RPi also shows information about the system current state through other components (led, buzzer, LCD display). |  |
| Waste Service GUI | Web application to monitor the Waste Service status. It displays any useful information about the current state of the system, including a representation of the Waste Area and the robot position inside of it. |  |
- Sprint0 - System Base Requirement Analysis
- Latest Release: Sprint0 v2
- Sprint Review: 08/09/22 16:30
- Sprint1 - WasteService Core-Business
- Latest Release: Sprint1 v3
- Sprint Review: 25/11/22 10:30
- Sprint2 - Raspberry Pi
- Latest Release: Sprint2 v1
- Sprint Review: 14/04/22 16:30
- Sprint3 - Monitoring
- Latest Release: WasteService
- Final Exam: 27/04/22 11:00
| Raffaele Battipaglia | Karina Chichifoi | Michele Righi |