Compilation of some of the visual object tracking algorithms I worked on
- Mosse Filter
- KCF
- Siamese Networks
- Non Siamese Networks
- Reinforcement Learning Based Approaches
- Research Areas to Work on in Visual Object Tracking
Reference :
Reference:
High-Speed Tracking with Kernelized Correlation Filters
J. F. Henriques, R. Caseiro, P. Martins, J. Batista
TPAMI 2015
A Siamese neural network is an artificial neural network that uses the same weights while working in tandem on two different input vectors to compute comparable output vectors. Siamese networks have proved to be of great applicaiton in the field of visual object tracking. The ability of Siamese networks to output comparable featur vectors which basically indicate the similarity between the input images / patches is exploited by many recent researchers in computer vision.

Both the reference image (usually the first frame labeled with the bounding box, Z) and the search image (X) are encoded into deep feature maps by the same - and therefore siamese - fully convolutional neural networks indicated by φ here. The feature map produced from the reference image (φ(Z)) is used like a correlation filter which is convolved (*) with the deep feature map of the search image to give the required score map, which is then used to get the bounding box coordinates.
A fully convolutional architechture allows a mapping function i.e φ to be used for images with different sizes, this brings out the essence of Siamese nature of the function.
The siamese network is pretrained on a dataset of videos with available groundtruth. Both positive and negative pairs of images are used to obtain better accuracy. Negative logarithmic loss is implemented with stochastic gradient descent (SGD) to arrive at optimal parameters.
Only offline training is used for the network to achieve weights that can be used for objects of any class. This also helps in achieving a high FPS and therefore real-time tracking.
This algo lets us depart from the traditional online learning methodology employed in tracking, and show an alternative approach that focuses on learning strong embeddings in an offline phase. The experiments using deep learning show that deep embeddings provide a naturally rich source of features which can be used for various purposes including this one.
- No online tracking. This specially helps when an object disappears or is occluded by any other object as when the object reappears the tracker tries to catch the object again by searching over a certain region.
- Greater accuracy in terms of Estimated Average Overlap (EAO) because of using the deep features.
- The algorithm works well in classification part of the tracking problem but still traditional methods are used to create search images and locate the required objects.
High Performance Visual Tracking with Siamese Region Proposal Network

SiamRPM is an extended version of SiamFC, combining the deep feature maps extracted from the fully convolutional network with the Region Proposal Network.
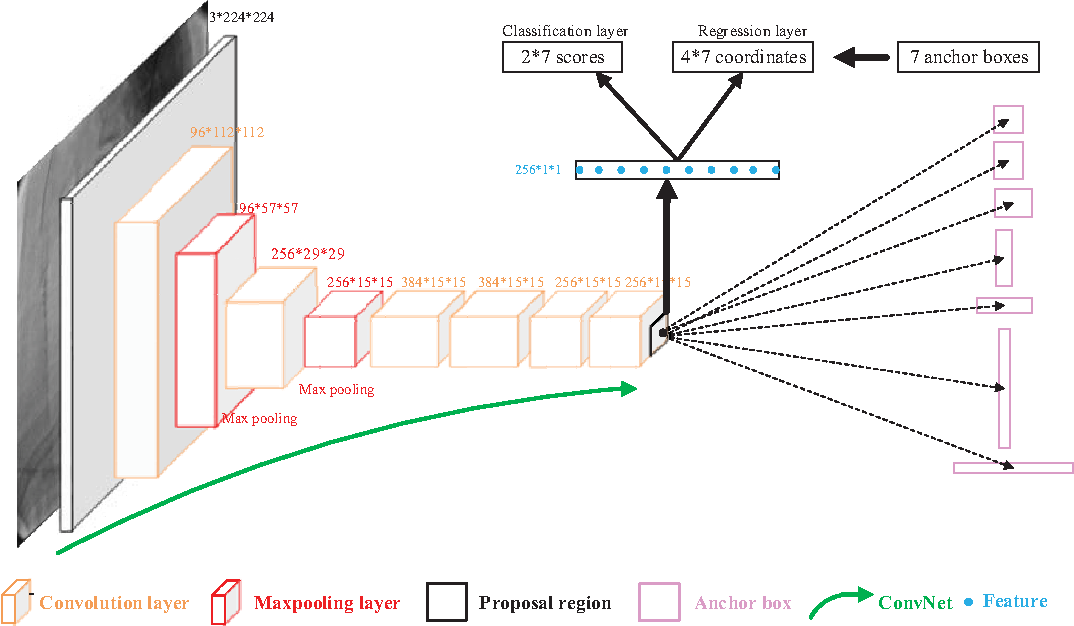
Region Proposal Network is used to propose regions containing objects (called anchors) in an image and their corresponding objectivity scores. To serve the purpose two branches - one for score classification and the other for the coordinates’ regression - are required.
- The given network is trained end to end offline, but the detection frame performs online inference as one shot detection. The forward pass on the detection branch is performed to obtain the classification and regression output, thus getting the top proposals.
The Siamese-RPN is trained end-to-end offline with large scale image pairs. During online tracking, the proposed framework is formulated as a local one shot detection task.
- This algorithm addresses the problem of search-image location and hence the object location with the help of a Region Proposal Network.
- The problem of tracking hereby is speculated and formulated as one shot detection, which opens the doors for using the object detection algorithms in tracking prospects.
Distractor-aware Siamese Networks for Visual Object Tracking
Features used in most Siamese tracking approaches can only discriminate foreground from the non-semantic backgrounds. The semantic backgrounds are always considered as distractors, which hinders the robustness of Siamese trackers. DaSiamRPN focuses on learning distractor-aware Siamese networks for accurate and long-term tracking. To this end, features used in traditional Siamese trackers are analyzed at first. It is observed that the imbalanced distribution of training data makes the learned features less discriminative. During the off-line training phase, an effective sampling strategy is introduced to control this distribution and make the model focus on the semantic distractors. During inference, a novel distractor-aware module is designed to perform incremental learning, which can effectively transfer the general embedding to the current video domain. In addition, DaSiamRPN extends the proposed approach for long-term tracking by introducing a simple yet effective local-to-global search region strategy.
-
Distractor aware training : Diverese categories of positive pairs can promote the generalization abilty, and using Semantic negative pairs can improve the discriminative ability.
-
Distractor aware incremental learning and long term tracking are used.
SiamRPN++: Evolution of Siamese Visual Tracking with Very Deep Networks

SiamRPN++ as its name suggests is a better version of SiamRPN which uses deep networks (ResNet) to obtain feature maps. Moreover, it proposes a new model architecture to perform layer-wise and depth-wise aggregations, which not only further improves the accuracy but also reduces the model size.
- Layer-wise aggregation
- Depth-wise cross correlation
Fast Online Object Tracking and Segmentation: A Unifying Approach
SiamMask illustrates how to perform both visual object tracking and semi-supervised video object segmentation, in real time with a single simple approach. It improves the offline training procedures of the previously mentioned SiamFC and SiamRPN by augmenting their loss with a binary segmentation task.
- Binary Segmentation along with the object tracking
- Improving the training procedures of the previous approaches by augmenting their loss with a binary segmentation task.
- This approach improvises the training procedure by augmenting the loss of previous approaches with a binary segmentation task. This improves the ability of the network to differentiate between the background and the foreground while tracking the object.

Action-Driven Visual Object Tracking With Deep Reinforcement Learning
Note: The above link requires access to IEEE sites. If you do not have access to it, you can check the paper in the folder named research papers
To come up with a totally new approach is quite a difficult task, but to summarize what most of the research papers have mentioned in the Further Work section and whatever I have learned these can be few prospective areas:
- Use of Sequence Models
- Attention Net
- Reinforcement Learning based approaches