The project is aim to detect the road lane for the future usage of PID control in self-driving car. Two types of code is implemented.
- Basic lane detection, computer vision process with greyscale image only shows edges of lanes.
- Higher level lane detection, with HSV color and left/right lane recognition.
- P1.ipynb stores all code.
- Goals
- Insight
- Reflection
- Conclusion
- Reference
- Basic Lane Finding Pipeline by combining the basic Helper Function, result shows in below:

Raw red lines in the image.
- First trial video output, turns static image into a series frames of movie.
- draw_line function improvement with fully extended lines and left/right lane is treated differently

Left lane exist in orange and right in blue.
- In Challenge program, a
hslfunction is used to convert BGR image to HSL, we can use this to extract a colored object, in our case, the white and yellow lane color need to be extract. According to OpenCV official document, in HSV and HSL, it is more easier to represent a color than in BGR color-space.
Since the technology used in the class, like Canny Edge/Region of Interest/Hough Transform Line Detection, is mainly taught by Udacity team and contribute by OpenCV, so I cannot declare most of those function is my original insight. The exclusive algorithm I made is:
-
The goal to find out left and right lane encourage me to find out a
draw_lines_avgfunction. Which include:- Detect the lane by slope of the line, also the exist region of point x1. see
line 101inIn [14]. - Filter out error-leads line objects by restrict the length into 50, see
line 109andline 111inIn [14]. Avoiding jitter in movie. - Use
stats.linregressfunction inscipylibrary to calculate slope more fast and efficiency.
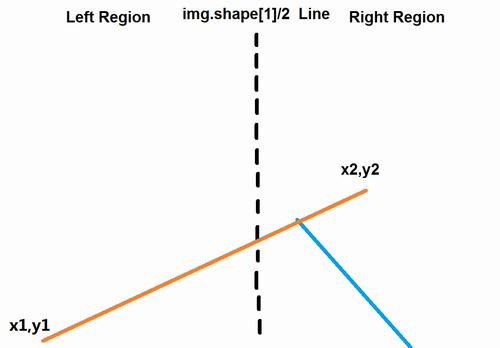
Before Region Split, the point locate at left and right may leads to a massive slope-changed lane.
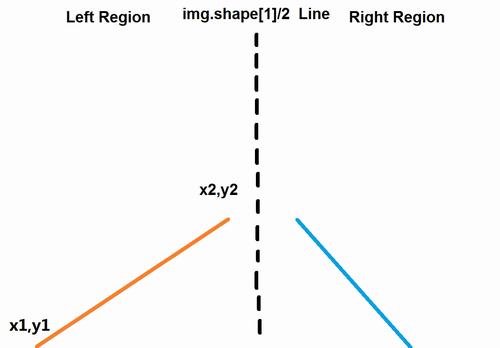
After Region Split.
- Produce enough data set (like particles in Particle Filter) under the linear regression line, helped to find out the extended dots inside the mask region.
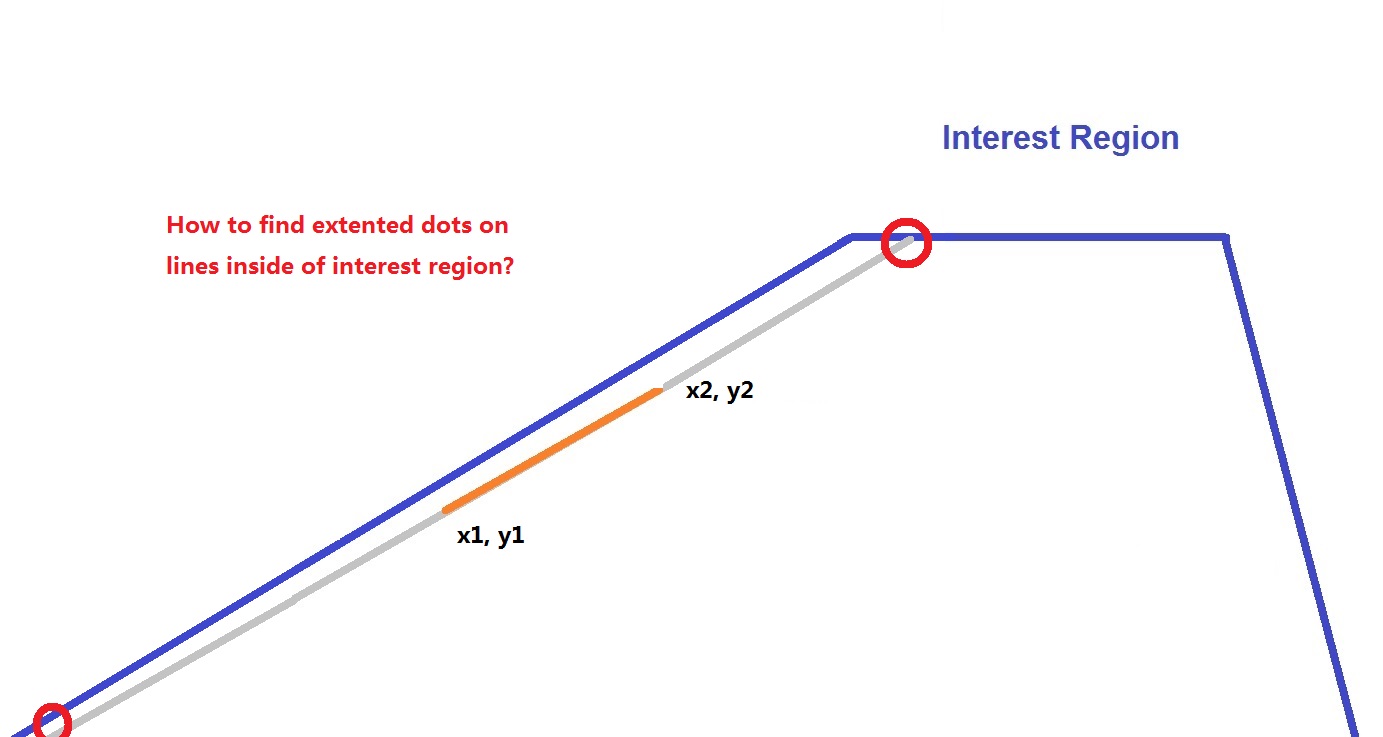
Fast-find the dots on edge.
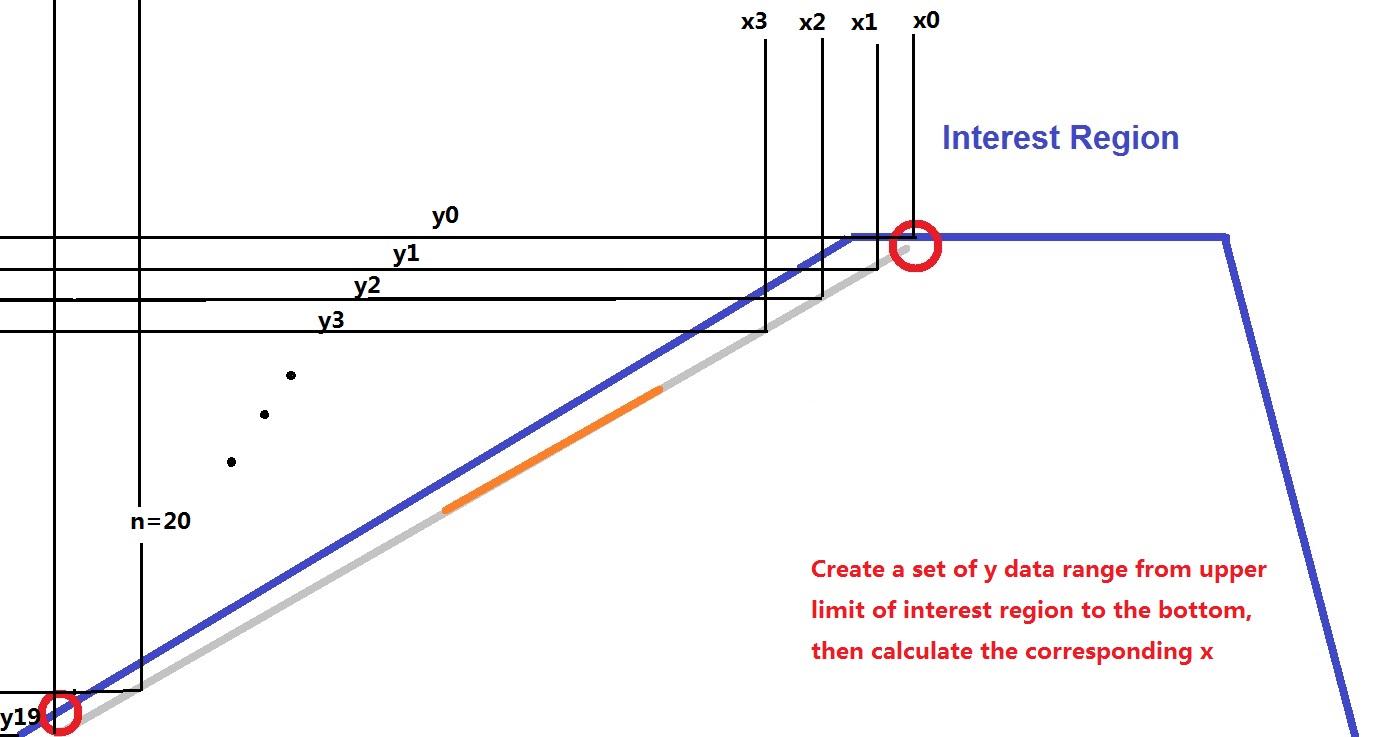
Creating fitting data on line.
Edge dots is the mixture of max or min of fitting data.
- Detect the lane by slope of the line, also the exist region of point x1. see
-
In the challenge program,
hslis used to filter out the white and yellow color for the purpose of better lane detection.






Image shows cv2 detect the target color in HSL but not in greyscale.
Please check P1.ipynb about sub-function for more, here only shows the main pipeline code as:
def process_image(frame):
# Apply color selection
hsl_image = hsl(frame)
# Convert it into grayscale and display again
gray = grayscale(hsl_image)
# Define a kernel size and apply Gaussian smoothing
kernel_size = 5
blur_gray = gaussian_blur(gray, kernel_size)
# Define our parameters for Canny and apply
low_threshold = 100
high_threshold = 200
edges = canny(blur_gray, low_threshold, high_threshold)
# This time we are defining a four sided polygon to mask
im_x = frame.shape[1]
im_y = frame.shape[0]
x_margin_l = 9/20
x_margin_r = 11/20
y_margin = 0.6
vertices = np.array([[(0,im_y),
(x_margin_l*im_x, y_margin*im_y),
(x_margin_r*im_x, y_margin*im_y),
(im_x,im_y)]], dtype=np.int32)
masked_edges = region_of_interest(edges, vertices)
# Define the Hough transform parameters
rho = 2 # distance resolution in pixels of the Hough grid
theta = np.pi/180 # angular resolution in radians of the Hough grid
threshold = 20#15 # minimum number of votes (intersections in Hough grid cell)
min_line_len = 15 # minimum number of pixels making up a line
max_line_gap = 40 # maximum gap in pixels between connectable line segments
# Run Hough on edge detected image
# Output "lines" is an array containing endpoints of detected line segments
lines = hough_lines_avg(masked_edges, rho, theta, threshold, min_line_len, max_line_gap,y_margin)
# Create a "color" binary image to combine with line image
color_edges = np.dstack((edges, edges, edges))
# Draw the lines on the edge image
lines_edges = weighted_img(lines, frame, α=1., β=1., λ=0.)
return lines_edges
# Read in and grayscale the image
img = frame
result = color(img)
return result
- Step 1
hsl(frame)Convert the RGB images into HSL color.
A sub-function
hslis defined. Within it,cv2.cvtColor(img, cv2.COLOR_RGB2HLS)is used. For a better understanding, see Reference[1] for more information.
- Step 2
grayscale(img)Convert image into greyscale.
In order to calculate color gradient easier in step 4, the image was converted into greyscale. A sub-function
grayscaleis defined. Within it,cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)is used.
- Step 3
gaussian_blur(gray, kernel_size)Apply gaussian blur for image.
Like the same tool in Photoshop, it turns(filter) the image looks more blur. As a result, it filter out small objects in the view meanwhile keeps the image processing mainly focus on bigger object. A sub-function
gaussian_bluris defined. Within it,cv2.GaussianBluris used.
- Step 4
canny(blur_gray, low_threshold, high_threshold)Apply image filter by gradient an edge detected image is return.
Canny edge detection is used to find out the edge of the straight line or road. Two gradient value is defined as 100 at low and 200 at high. A sub-function
cannyis defined. Within it,cv2.Cannyis used.
- Step 5
region_of_interest(edges, vertices)Produce region of interest mask for keep interest focus on ahead of the car.
Create mask by defined vertices. Since all main code was provide by Udacity, the only thing I want to mention is I create a variable called
y_marginto control the position of region's upper limit vertically. It's easy to define how much area you want to cover, 50% or 80%? just type in 0.5 or 0.8. In our case, I applied it into 0.60.
- Step 6
hough_lines_avg(masked_edges, rho, theta, threshold, min_line_len, max_line_gap,y_margin)Detect and return lines by Hough transform under user defined parameters.
The philosophy of this step is to keep detected line has a longer length and combine them all into a longer line as much as possible. The parameters I used is listed as below:
- rho = 2 pixels
- theta = 2 radian
- threshold = 20 votes
- min_line_len = 15 pixels
- max_line_gap = 40 pixels
For the purpose of left/right lane detection, a sub-function
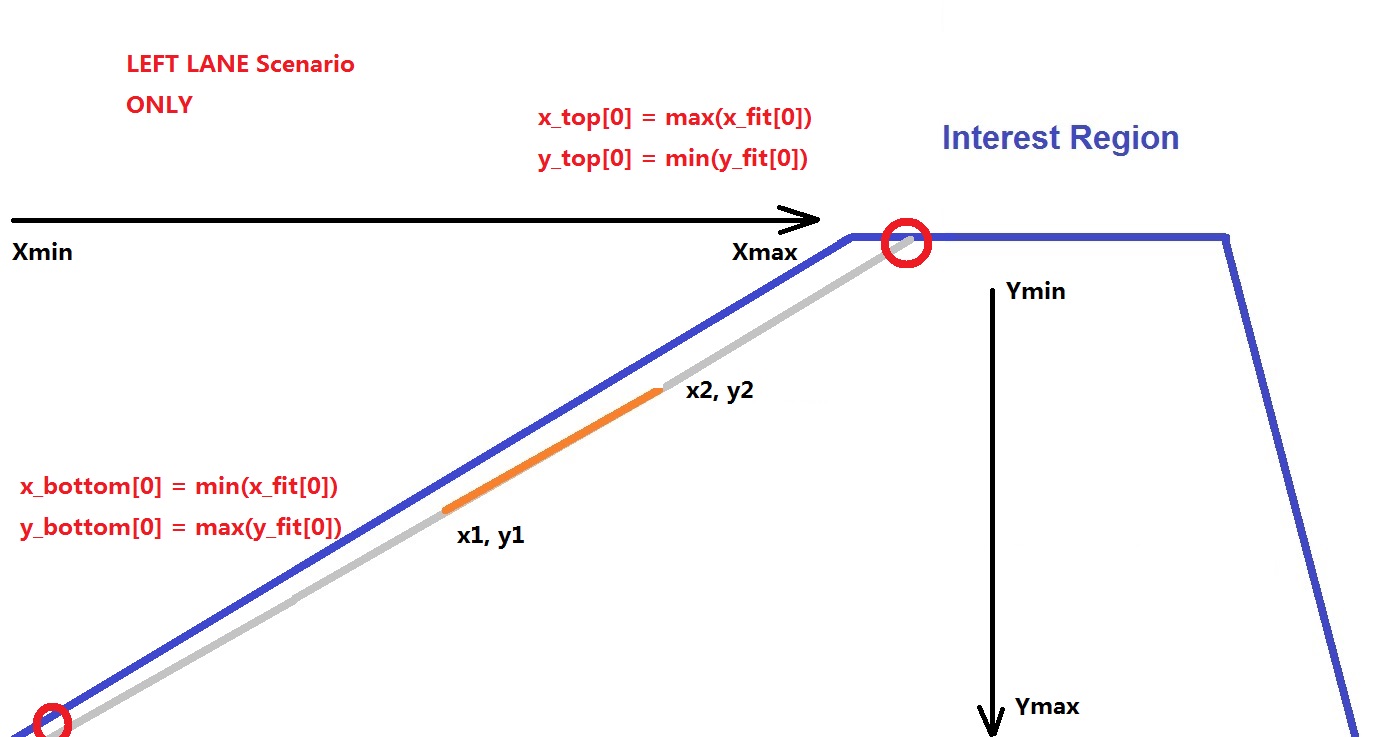
hough_lines_avgis defined, which means the lane would recognized and colored as left and right under different slope rate. Within it, another sub-functiondraw_lines_avgis created. The interesting thing here is, I create array sets for left right as [0] and [1], in this way we could apply loop to filter out small line and severely slope-rate changed lines. It keeps focus on lane but not other edges, like hood edges in the sight view. And also, a linear regression fitting function is called, the purpose is find out the intersection point by slope line and edge of interest region. I think my algorithm is an unique method compare to just simply defined the intersection point byy=a*x+bformula. In further, it may help when solving a more realistic curve lane is detected in future. See Insight section for more information.
- Step 7
weighted_img(lines, frame, α=1., β=1., λ=0.)Combine raw frame and detected lane image.
Simply add two image together with different weighting factors. In our case, I put both image as same factor at 1. A sub-function
weighted_imgis defined. Within it,cv2.addWeightedis called.
- Step 8 Loop all frames to create movie
No further self-contribution.

Solid Yellow Left Lane Detection Output Video.

Challenge Quiz Lane Detection Output Video.
As a film, the detected lane looks jitter minor frequently, this is due to the fast changing slope rate in each frame. Some people may apply weighting factors on current frame and previous frame to average such phenomenon. However, I don't know which way is helps to aiming a better PID control in future course. So I keep this result, let's see what we can do in future research. Consider algorithm efficiency, I was wondering my algorithm in slope detection loop may cause longer real time processing time, which may leads to slow reaction when high speed driving. This need to be investigated then make any decision.
- A better and quicker algorithm to maintain the most lane slope information and also has a very fast calculation speed.
- Since CV2 has a bunch of color detection function, it's important to develop a more rugged algorithm with other color space.
- Try fitting curve lane and more parameter calculation.(Like centerline, lateral velocity)
- A full explanation of the HSL color usage, it's very clear to understanding. naokishibuya's git
- Deep understanding Hough transform coding in different languages . rosettacode
- The most view lane detection video on YouTube. ChanHee Jean's channel