
1.0
添加一个点云建图线程,接收来自 Tracking线程的关键帧。
使用 彩色图和深度图 生成点云
对关键帧 的 彩色图 使用 mobilenetv2-ssd-lite 进行目标检测。
对每个目标区域 的点云计算 点云中心 3D包围框信息 ( 会使用深度均值进行滤波)。(方案2,点云分割聚类后和2d框计算交并比)
加入到 语义目标数据库中。
当 是相同的类别且位置中心没有太大的变化,则认为是同一个物体,融合相关信息。
2.0
对关键点使用 动点检测算法进行过滤
在原地图构建类中 加入 octomap地图构建部分
其次对关键帧使用新的 目标检测线程进行 检测
在构建octomap地图的同时构建语义目标数据库
保存和载入 orb-slam2地图和octomap地图
3.0
想法: 使用语义分割/实例分割 构建更精细的 语义目标数据库
使用 目标检测结果和 动点检测算法对 关键点进行 过滤
建图时 除去 动点 和 检测结果中的先验动点
OctoMap/octomap_mapping 官方建图参考 2D导航等
动态环境处理
光流运动一致性检测,投影点距离基线距离阈值 语义分割 DS-SLAM 代码
语义信息融合
Towards Semantic SLAM using a Monocular Camera
Probabilistic Data Association for Semantic SLAM
1. 考虑动态环境(语义信息、多视角几何、光流、运动一致性检测)
2. 动态更新 语义地图 (语义信息 加入到 数据关联 损失函数中、octo-map语义地图概率更新语义和动态特性)
3. orbslam2地图 与 octomap地图的 保存与载入
将 语义数据库信息 加入到 octo-map 中
使用 octo-map的概率信息 更新语义数据库
octomap地图:


ORB-SLAM2地图切换

语义pcl点云图

2d 融合3d效果图
方案1:

方案2:


动态点检测
方案1:

方案2:

相机定位轨迹对比, tum ft3 walking数据集上

flow:
compared_pose_pairs 826 pairs
absolute_translational_error.rmse 0.387510 m
absolute_translational_error.mean 0.316048 m
absolute_translational_error.median 0.203472 m
absolute_translational_error.std 0.224227 m
absolute_translational_error.min 0.070175 m
absolute_translational_error.max 1.052806 m
geom:
compared_pose_pairs 826 pairs
absolute_translational_error.rmse 0.151517 m
absolute_translational_error.mean 0.070537 m
absolute_translational_error.median 0.041738 m
absolute_translational_error.std 0.134097 m
absolute_translational_error.min 0.002700 m
absolute_translational_error.max 0.889107 m
src:
compared_pose_pairs 826 pairs
absolute_translational_error.rmse 0.702233 m
absolute_translational_error.mean 0.582247 m
absolute_translational_error.median 0.520550 m
absolute_translational_error.std 0.392580 m
absolute_translational_error.min 0.077351 m
absolute_translational_error.max 1.476973 m
目标检出率低(更好的目标检测/实例分割模型、地图点和语义信息化挂钩,将语义信息加入到数据关联目标函数中)
octomap的动态地图更新效果不太理想(octomap 概率更新探索,建图时直接剔除动态点)
地图大了之后,系统 响应变慢 (地图维护)
地图导航、路径规划
智能导航
路标点集合 L = {Lm} m=[1:M]
传感器姿态序列 X = {xt} t=[1:T]
传感器测量值 Z = {zk} k=[1:K]
数据关联 D = {(ak, bk)} k=[1:K]
意义是 地zk次测量下 姿态 x_ak 和 路标点 L_bk 相关联
统计学方法,已知数据 Z,求出现Z的最大概率对应的系统参数 L,X,D========
普通硬决策方法:(特征点法====)
先求得一个准确的 关联D' D' <---arg max log p(D|X0,L0,Z)
使用先验的 位姿X0(orb-slam2中运动模型得到) 和
已经存在的地图点L0 以及传感器观测信息Z
求解一个最大概率的 2D-3D点数据关联 / 3D-3D点数据关联
取对数,仍然是正相关,[0,1] ---->映射到 [-无穷大,0]
在使用这个关联D 来最大化 模型(X,L,D)出现数据Z的概率,
得到最优 的 X,L
X,L <------ arg max p(Z|X,L,D')
通过最小化 数据关联误差(即最大化观测成立概率),优化位姿X 和 地图点L
软决策,考虑不确定性:(类似直接法,不需要准确的数据关联)
关联D 是由多种状态 叠加而成,是一个叠加状态,薛定鄂的猫===^===^===
首先考虑所有 可能的 数据关联 D
计算其数据分布 获得每一种关联zk (Xak, Lbk) 对应的概率 wij
位姿Xak下,测量值 zk 关联 地图点 Lbk
在多种数据关联下 最大化
X,L <------ arg max sum(sum( wij * log p(zk|ak, bk)))
地图点属于每种类类别的概率分布
常规 损失函数: 光度误差(photometric error, 直接法,光度不变,数据关联点,灰度误差)
几何误差(geometric error, 特征点法,重投影位置误差)
语义误差:
语义分割观测 Sk
地图点 P 3d坐标、属于每种类别的概率(Wic),主要用于误差加权
p(Sk| 相机位姿Tk, 地图点位置Xi, 对应2d投影点类别)
一个语义分割Sk ----> n 个 不同类别的 0-1 mask
属于 当前类的为1,其它类为0
2D像素点 -----> 1D 具体类别 距离函数
Authors: Raul Mur-Artal, Juan D. Tardos, J. M. M. Montiel and Dorian Galvez-Lopez (DBoW2)
13 Jan 2017: OpenCV 3 and Eigen 3.3 are now supported.
22 Dec 2016: Added AR demo (see section 7).
ORB-SLAM2 is a real-time SLAM library for Monocular, Stereo and RGB-D cameras that computes the camera trajectory and a sparse 3D reconstruction (in the stereo and RGB-D case with true scale). It is able to detect loops and relocalize the camera in real time. We provide examples to run the SLAM system in the KITTI dataset as stereo or monocular, in the TUM dataset as RGB-D or monocular, and in the EuRoC dataset as stereo or monocular. We also provide a ROS node to process live monocular, stereo or RGB-D streams. The library can be compiled without ROS. ORB-SLAM2 provides a GUI to change between a SLAM Mode and Localization Mode, see section 9 of this document.

[Monocular] Raúl Mur-Artal, J. M. M. Montiel and Juan D. Tardós. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Transactions on Robotics, vol. 31, no. 5, pp. 1147-1163, 2015. (2015 IEEE Transactions on Robotics Best Paper Award). PDF.
[Stereo and RGB-D] Raúl Mur-Artal and Juan D. Tardós. ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras. IEEE Transactions on Robotics, vol. 33, no. 5, pp. 1255-1262, 2017. PDF.
[DBoW2 Place Recognizer] Dorian Gálvez-López and Juan D. Tardós. Bags of Binary Words for Fast Place Recognition in Image Sequences. IEEE Transactions on Robotics, vol. 28, no. 5, pp. 1188-1197, 2012. PDF
ORB-SLAM2 is released under a GPLv3 license. For a list of all code/library dependencies (and associated licenses), please see Dependencies.md.
For a closed-source version of ORB-SLAM2 for commercial purposes, please contact the authors: orbslam (at) unizar (dot) es.
If you use ORB-SLAM2 (Monocular) in an academic work, please cite:
@article{murTRO2015,
title={{ORB-SLAM}: a Versatile and Accurate Monocular {SLAM} System},
author={Mur-Artal, Ra\'ul, Montiel, J. M. M. and Tard\'os, Juan D.},
journal={IEEE Transactions on Robotics},
volume={31},
number={5},
pages={1147--1163},
doi = {10.1109/TRO.2015.2463671},
year={2015}
}
if you use ORB-SLAM2 (Stereo or RGB-D) in an academic work, please cite:
@article{murORB2,
title={{ORB-SLAM2}: an Open-Source {SLAM} System for Monocular, Stereo and {RGB-D} Cameras},
author={Mur-Artal, Ra\'ul and Tard\'os, Juan D.},
journal={IEEE Transactions on Robotics},
volume={33},
number={5},
pages={1255--1262},
doi = {10.1109/TRO.2017.2705103},
year={2017}
}
We have tested the library in Ubuntu 12.04, 14.04 and 16.04, but it should be easy to compile in other platforms. A powerful computer (e.g. i7) will ensure real-time performance and provide more stable and accurate results.
We use the new thread and chrono functionalities of C++11.
We use Pangolin for visualization and user interface. Dowload and install instructions can be found at: https://github.com/stevenlovegrove/Pangolin.
We use OpenCV to manipulate images and features. Dowload and install instructions can be found at: http://opencv.org. Required at leat 2.4.3. Tested with OpenCV 2.4.11 and OpenCV 3.2.
Required by g2o (see below). Download and install instructions can be found at: http://eigen.tuxfamily.org. Required at least 3.1.0.
We use modified versions of the DBoW2 library to perform place recognition and g2o library to perform non-linear optimizations. Both modified libraries (which are BSD) are included in the Thirdparty folder.
We provide some examples to process the live input of a monocular, stereo or RGB-D camera using ROS. Building these examples is optional. In case you want to use ROS, a version Hydro or newer is needed.
Clone the repository:
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2
We provide a script build.sh to build the Thirdparty libraries and ORB-SLAM2. Please make sure you have installed all required dependencies (see section 2). Execute:
cd ORB_SLAM2
chmod +x build.sh
./build.sh
This will create libORB_SLAM2.so at lib folder and the executables mono_tum, mono_kitti, rgbd_tum, stereo_kitti, mono_euroc and stereo_euroc in Examples folder.
-
Download a sequence from http://vision.in.tum.de/data/datasets/rgbd-dataset/download and uncompress it.
-
Execute the following command. Change
TUMX.yamlto TUM1.yaml,TUM2.yaml or TUM3.yaml for freiburg1, freiburg2 and freiburg3 sequences respectively. ChangePATH_TO_SEQUENCE_FOLDERto the uncompressed sequence folder.
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUMX.yaml PATH_TO_SEQUENCE_FOLDER
ewenwan@ewenwan-Lenovo-G480:~/ewenwan/project/ORB_SLAM2-master/Examples/RGB-D$ ./rgbd_tum ../../Vocabulary/ORBvoc.txt ./TUM3.yaml ../../../../data/f3_walking_xyz/ ../../../../data/f3_walking_xyz/associate.txt
-
Download the dataset (grayscale images) from http://www.cvlibs.net/datasets/kitti/eval_odometry.php
-
Execute the following command. Change
KITTIX.yamlby KITTI00-02.yaml, KITTI03.yaml or KITTI04-12.yaml for sequence 0 to 2, 3, and 4 to 12 respectively. ChangePATH_TO_DATASET_FOLDERto the uncompressed dataset folder. ChangeSEQUENCE_NUMBERto 00, 01, 02,.., 11.
./Examples/Monocular/mono_kitti Vocabulary/ORBvoc.txt Examples/Monocular/KITTIX.yaml PATH_TO_DATASET_FOLDER/dataset/sequences/SEQUENCE_NUMBER
-
Download a sequence (ASL format) from http://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets
-
Execute the following first command for V1 and V2 sequences, or the second command for MH sequences. Change PATH_TO_SEQUENCE_FOLDER and SEQUENCE according to the sequence you want to run.
./Examples/Monocular/mono_euroc Vocabulary/ORBvoc.txt Examples/Monocular/EuRoC.yaml PATH_TO_SEQUENCE_FOLDER/mav0/cam0/data Examples/Monocular/EuRoC_TimeStamps/SEQUENCE.txt
./Examples/Monocular/mono_euroc Vocabulary/ORBvoc.txt Examples/Monocular/EuRoC.yaml PATH_TO_SEQUENCE/cam0/data Examples/Monocular/EuRoC_TimeStamps/SEQUENCE.txt
-
Download the dataset (grayscale images) from http://www.cvlibs.net/datasets/kitti/eval_odometry.php
-
Execute the following command. Change
KITTIX.yamlto KITTI00-02.yaml, KITTI03.yaml or KITTI04-12.yaml for sequence 0 to 2, 3, and 4 to 12 respectively. ChangePATH_TO_DATASET_FOLDERto the uncompressed dataset folder. ChangeSEQUENCE_NUMBERto 00, 01, 02,.., 11.
./Examples/Stereo/stereo_kitti Vocabulary/ORBvoc.txt Examples/Stereo/KITTIX.yaml PATH_TO_DATASET_FOLDER/dataset/sequences/SEQUENCE_NUMBER
-
Download a sequence (ASL format) from http://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets
-
Execute the following first command for V1 and V2 sequences, or the second command for MH sequences. Change PATH_TO_SEQUENCE_FOLDER and SEQUENCE according to the sequence you want to run.
./Examples/Stereo/stereo_euroc Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml PATH_TO_SEQUENCE/mav0/cam0/data PATH_TO_SEQUENCE/mav0/cam1/data Examples/Stereo/EuRoC_TimeStamps/SEQUENCE.txt
./Examples/Stereo/stereo_euroc Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml PATH_TO_SEQUENCE/cam0/data PATH_TO_SEQUENCE/cam1/data Examples/Stereo/EuRoC_TimeStamps/SEQUENCE.txt
-
Download a sequence from http://vision.in.tum.de/data/datasets/rgbd-dataset/download and uncompress it.
下载 https://www.mrpt.org/Collection_of_Kinect_RGBD_datasets_with_ground_truth_CVPR_TUM_2011
-
Associate RGB images and depth images using the python script associate.py. We already provide associations for some of the sequences in Examples/RGB-D/associations/. You can generate your own associations file executing:
python associate.py PATH_TO_SEQUENCE/rgb.txt PATH_TO_SEQUENCE/depth.txt > associations.txt
- Execute the following command. Change
TUMX.yamlto TUM1.yaml,TUM2.yaml or TUM3.yaml for freiburg1, freiburg2 and freiburg3 sequences respectively. ChangePATH_TO_SEQUENCE_FOLDERto the uncompressed sequence folder. ChangeASSOCIATIONS_FILEto the path to the corresponding associations file.
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUMX.yaml PATH_TO_SEQUENCE_FOLDER ASSOCIATIONS_FILE
- Add the path including Examples/ROS/ORB_SLAM2 to the ROS_PACKAGE_PATH environment variable. Open .bashrc file and add at the end the following line. Replace PATH by the folder where you cloned ORB_SLAM2:
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:PATH/ORB_SLAM2/Examples/ROS
- Execute
build_ros.shscript:
chmod +x build_ros.sh
./build_ros.sh
For a monocular input from topic /camera/image_raw run node ORB_SLAM2/Mono. You will need to provide the vocabulary file and a settings file. See the monocular examples above.
rosrun ORB_SLAM2 Mono PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE
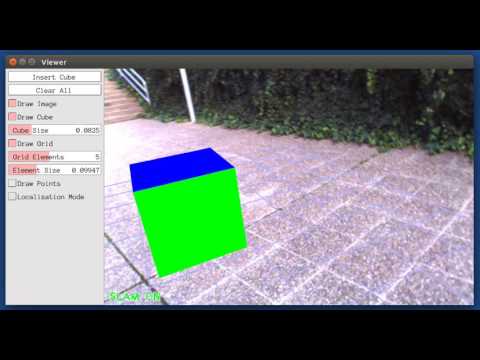
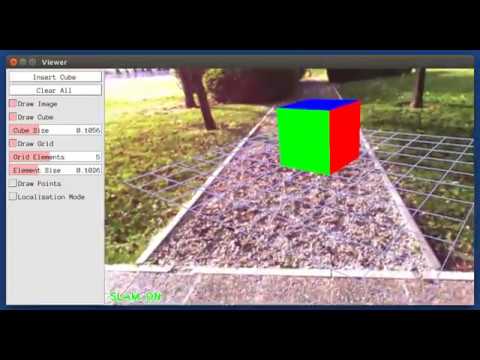
This is a demo of augmented reality where you can use an interface to insert virtual cubes in planar regions of the scene.
The node reads images from topic /camera/image_raw.
rosrun ORB_SLAM2 MonoAR PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE
For a stereo input from topic /camera/left/image_raw and /camera/right/image_raw run node ORB_SLAM2/Stereo. You will need to provide the vocabulary file and a settings file. If you provide rectification matrices (see Examples/Stereo/EuRoC.yaml example), the node will recitify the images online, otherwise images must be pre-rectified.
rosrun ORB_SLAM2 Stereo PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE ONLINE_RECTIFICATION
Example: Download a rosbag (e.g. V1_01_easy.bag) from the EuRoC dataset (http://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets). Open 3 tabs on the terminal and run the following command at each tab:
roscore
rosrun ORB_SLAM2 Stereo Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml true
rosbag play --pause V1_01_easy.bag /cam0/image_raw:=/camera/left/image_raw /cam1/image_raw:=/camera/right/image_raw
Once ORB-SLAM2 has loaded the vocabulary, press space in the rosbag tab. Enjoy!. Note: a powerful computer is required to run the most exigent sequences of this dataset.
For an RGB-D input from topics /camera/rgb/image_raw and /camera/depth_registered/image_raw, run node ORB_SLAM2/RGBD. You will need to provide the vocabulary file and a settings file. See the RGB-D example above.
rosrun ORB_SLAM2 RGBD PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE
You will need to create a settings file with the calibration of your camera. See the settings file provided for the TUM and KITTI datasets for monocular, stereo and RGB-D cameras. We use the calibration model of OpenCV. See the examples to learn how to create a program that makes use of the ORB-SLAM2 library and how to pass images to the SLAM system. Stereo input must be synchronized and rectified. RGB-D input must be synchronized and depth registered.
You can change between the SLAM and Localization mode using the GUI of the map viewer.
This is the default mode. The system runs in parallal three threads: Tracking, Local Mapping and Loop Closing. The system localizes the camera, builds new map and tries to close loops.
This mode can be used when you have a good map of your working area. In this mode the Local Mapping and Loop Closing are deactivated. The system localizes the camera in the map (which is no longer updated), using relocalization if needed.