Author's mail : sli@informatik.uni-hamburg.de, jeasinema@gmail.com
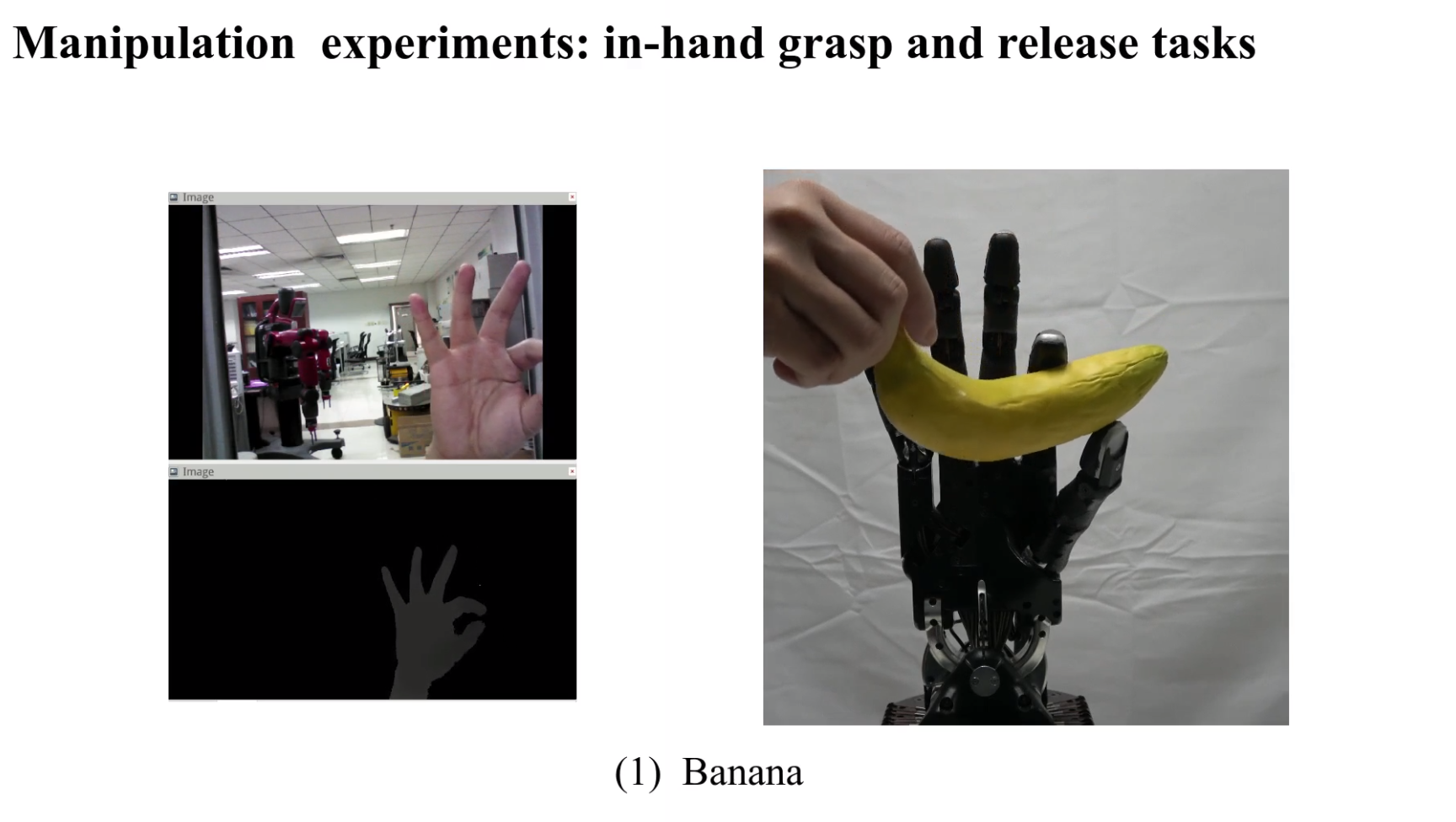
This package produces visually similar robot hand poses based on depth images of the human hand in an end-to-end fashion, which is a collaborative work done by TAMS and Fucun Sun's lab of Tsinghua University.
The special structure of TeachNet, combined with a consistency loss function, handles the differences in appearance and anatomy between human and robotic hands. A synchronized human-robot training set is generated from an existing dataset of labeled depth images of the human hand and from simulated depth images of a robotic hand.
Please cite this paper (Vision-based Teleoperation of Shadow Dexterous Hand using End-to-End Deep Neural Network), if you use our released code.

- [ROS Kinetic and Ubuntu 16.04]]
- [CUDA 9]
- bio_ik
- Moveit
- common_resources
- sr-config
- sr_interface
- sr-ros-interface-ethercat
- ros_ethercat
- sr_common
- sr_core
- sr-ros-interface
- sr_tools
- ros_control_robot
- python2.7
- PyTorch
- mayavi
- numpy
- tensorboard
- matplotlib
- pickle
- pandas
- seaborn
- librealsense
- Install necessary packages (kinetic branch) for Shadow Hand.
- Install Bio IK packages. Please follow the Basic Usage in README.md in bio_ik repository and set correct kinematics solver.
- Install RealSense Camera package:
sudo apt install ros-kinetic-realsense-camera - To simplify it, you can put above packages in one ros workspace.
- Download our package in same workspace, then build this package with catkin_make.
- Download (BigHand2.2M dataset). Put the lable file
Training_Annotation.txtintoros/src/shadow_teleop/data/Human_label/. - Generate robot mapping file by human hand keypoints from BigHand2.2M dataset. The generated file save in
ros/src/shadow_teleop/data/human_robot_mapdata.csv.python ros/src/shadow_teleop/scripts/human_robot_mappingfile.py - Run shadow hand in gazebo and use the our simulation world (./ros/src/teleop_motorhand/worlds/shadowhand_multiview.world).
roslaunch teleop_motorhand shadow.launch - Generate dataset by running the code:
roslaunch shadow_teleop multi_shadow_sim_bio.launch
Please change the location of human_robot_mapdata.csv, the location of saved depth images, and the location of saved correspond joints in this launch file.
- Download pretrained models for real-time test.
-
If you want to train the network yourself instead of using a pretrained model, follow below steps.
-
Launch a tensorboard for monitoring:
tensorboard --log-dir ./assets/log --port 8080
and run an experiment for 200 epoch:
python main.py --epoch 200 --mode 'train' --batch-size 256 --lr 0.01 --gpu 1 --tag 'teachnet'File name and corresponding experiment:
main.py --- Teach Hard-Early approach main_baseline_human.py --- Single human main_baseline_shadow.py --- Single shadow main_gan.py --- Teach Soft-Early approach
-
Launch camera RealsenseF200 (If you use the other camera which is suitable for close-range tracking, please use corresponding launch file). Or you can download the recorded example rosbag, and play the bag file:
rosbag play [-l] example.bag -
Run Shadow hand in simulation or real world.
-
Run the collision check service:
rosrun shadow_teleop interpolate_traj_service -
Run the demo code.
- Change the correct topic name based on your camera.
- Limit your right hand to the viewpoint range of [30°, 120°] and the distance range of [15mm, 40mm] from the camera.
python shadow_demo.py --model-path pretrained-model-location [--gpu 1]
If you use this work(collobrated with ), please cite:
@article{li2018vision,
title={Vision-based Teleoperation of Shadow Dexterous Hand using End-to-End Deep Neural Network},
author={Li, Shuang and Ma, Xiaojian and Liang, Hongzhuo and G{\"o}rner, Michael and Ruppel, Philipp and Fang, Bing and Sun, Fuchun and Zhang, Jianwei},
journal={arXiv preprint arXiv:1809.06268},
year={2018}
}