einops_video.mp4
![]()
![]()
Flexible and powerful tensor operations for readable and reliable code.
Supports numpy, pytorch, tensorflow, jax, and others.
- einops 0.6 introduces packing and unpacking
- einops 0.5: einsum is now a part of einops
- Einops paper is accepted for oral presentation at ICLR 2022 (yes, it worth reading)
- flax and oneflow backend added
- torch.jit.script is supported for pytorch layers
- powerful EinMix added to einops. Einmix tutorial notebook
In case you need convincing arguments for setting aside time to learn about einsum and einops... Tim Rocktäschel, FAIR
Writing better code with PyTorch and einops 👌 Andrej Karpathy, AI at Tesla
Slowly but surely, einops is seeping in to every nook and cranny of my code. If you find yourself shuffling around bazillion dimensional tensors, this might change your life Nasim Rahaman, MILA (Montreal)
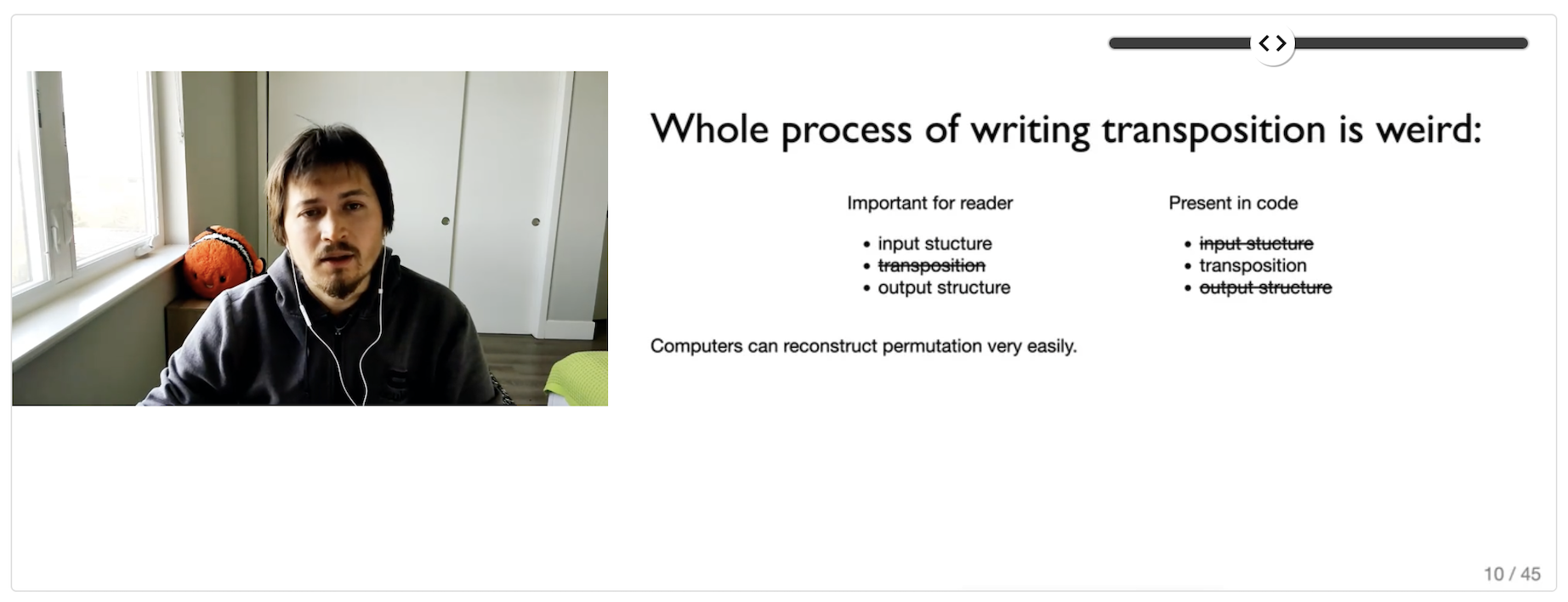
Watch a 15-minute talk focused on main problems of standard tensor manipulation methods, and how einops improves this process.
- Installation
- Documentation
- Tutorial
- API micro-reference
- Why using einops
- Supported frameworks
- Repository and discussions
Plain and simple:
pip install einopsTutorials are the most convenient way to see einops in action
- part 1: einops fundamentals
- part 2: einops for deep learning
- part 3: packing and unpacking
- part 4: improve pytorch code with einops
einops has a minimalistic yet powerful API.
Three core operations provided (einops tutorial shows those cover stacking, reshape, transposition, squeeze/unsqueeze, repeat, tile, concatenate, view and numerous reductions)
from einops import rearrange, reduce, repeat
# rearrange elements according to the pattern
output_tensor = rearrange(input_tensor, 't b c -> b c t')
# combine rearrangement and reduction
output_tensor = reduce(input_tensor, 'b c (h h2) (w w2) -> b h w c', 'mean', h2=2, w2=2)
# copy along a new axis
output_tensor = repeat(input_tensor, 'h w -> h w c', c=3)And two corresponding layers (einops keeps a separate version for each framework) with the same API.
from einops.layers.torch import Rearrange, Reduce
from einops.layers.tensorflow import Rearrange, Reduce
from einops.layers.flax import Rearrange, Reduce
from einops.layers.gluon import Rearrange, Reduce
from einops.layers.keras import Rearrange, Reduce
from einops.layers.chainer import Rearrange, ReduceLayers behave similarly to operations and have the same parameters (with the exception of the first argument, which is passed during call).
Example of using layers within a model:
# example given for pytorch, but code in other frameworks is almost identical
from torch.nn import Sequential, Conv2d, MaxPool2d, Linear, ReLU
from einops.layers.torch import Rearrange
model = Sequential(
...,
Conv2d(6, 16, kernel_size=5),
MaxPool2d(kernel_size=2),
# flattening without need to write forward
Rearrange('b c h w -> b (c h w)'),
Linear(16*5*5, 120),
ReLU(),
Linear(120, 10),
)Later additions to the family are einsum, pack and unpack functions:
from einops import einsum, pack, unpack
# einsum is like ... einsum, generic and flexible dot-product
# but 1) axes can be multi-lettered 2) pattern goes last 3) works with multiple frameworks
C = einsum(A, B, 'b t1 head c, b t2 head c -> b head t1 t2')
# pack and unpack allow reversibly 'packing' multiple tensors into one.
# Packed tensors may be of different dimensionality:
packed, ps = pack([class_token_bc, image_tokens_bhwc, text_tokens_btc], 'b * c')
class_emb_bc, image_emb_bhwc, text_emb_btc = unpack(transformer(packed), ps, 'b * c')
# Pack/Unpack are more convenient than concat and split, see tutorialLast, but not the least EinMix layer is available!
EinMix is a generic linear layer, perfect for MLP Mixers and similar architectures.
einops stands for Einstein-Inspired Notation for operations
(though "Einstein operations" is more attractive and easier to remember).
Notation was loosely inspired by Einstein summation (in particular by numpy.einsum operation).
y = x.view(x.shape[0], -1)
y = rearrange(x, 'b c h w -> b (c h w)')While these two lines are doing the same job in some context,
the second one provides information about the input and output.
In other words, einops focuses on interface: what is the input and output, not how the output is computed.
The next operation looks similar:
y = rearrange(x, 'time c h w -> time (c h w)')but it gives the reader a hint: this is not an independent batch of images we are processing, but rather a sequence (video).
Semantic information makes the code easier to read and maintain.
Reconsider the same example:
y = x.view(x.shape[0], -1) # x: (batch, 256, 19, 19)
y = rearrange(x, 'b c h w -> b (c h w)')The second line checks that the input has four dimensions, but you can also specify particular dimensions. That's opposed to just writing comments about shapes since comments don't prevent mistakes, not tested, and without code review tend to be outdated
y = x.view(x.shape[0], -1) # x: (batch, 256, 19, 19)
y = rearrange(x, 'b c h w -> b (c h w)', c=256, h=19, w=19)Below we have at least two ways to define the depth-to-space operation
# depth-to-space
rearrange(x, 'b c (h h2) (w w2) -> b (c h2 w2) h w', h2=2, w2=2)
rearrange(x, 'b c (h h2) (w w2) -> b (h2 w2 c) h w', h2=2, w2=2)There are at least four more ways to do it. Which one is used by the framework?
These details are ignored, since usually it makes no difference, but it can make a big difference (e.g. if you use grouped convolutions in the next stage), and you'd like to specify this in your code.
reduce(x, 'b c (x dx) -> b c x', 'max', dx=2)
reduce(x, 'b c (x dx) (y dy) -> b c x y', 'max', dx=2, dy=3)
reduce(x, 'b c (x dx) (y dy) (z dz) -> b c x y z', 'max', dx=2, dy=3, dz=4)These examples demonstrated that we don't use separate operations for 1d/2d/3d pooling, those are all defined in a uniform way.
Space-to-depth and depth-to space are defined in many frameworks but how about width-to-height? Here you go:
rearrange(x, 'b c h (w w2) -> b c (h w2) w', w2=2)Even simple functions are defined differently by different frameworks
y = x.flatten() # or flatten(x)Suppose x's shape was (3, 4, 5), then y has shape ...
- numpy, cupy, chainer, pytorch:
(60,) - keras, tensorflow.layers, gluon:
(3, 20)
einops works the same way in all frameworks.
Example: tile vs repeat causes lots of confusion. To copy image along width:
np.tile(image, (1, 2)) # in numpy
image.repeat(1, 2) # pytorch's repeat ~ numpy's tileWith einops you don't need to decipher which axis was repeated:
repeat(image, 'h w -> h (tile w)', tile=2) # in numpy
repeat(image, 'h w -> h (tile w)', tile=2) # in pytorch
repeat(image, 'h w -> h (tile w)', tile=2) # in tf
repeat(image, 'h w -> h (tile w)', tile=2) # in jax
repeat(image, 'h w -> h (tile w)', tile=2) # in cupy
... (etc.)Testimonials provide user's perspective on the same question.
Einops works with ...
Please use the following bibtex record
@inproceedings{
rogozhnikov2022einops,
title={Einops: Clear and Reliable Tensor Manipulations with Einstein-like Notation},
author={Alex Rogozhnikov},
booktitle={International Conference on Learning Representations},
year={2022},
url={https://openreview.net/forum?id=oapKSVM2bcj}
}
einops works with python 3.7 or later.