- You want to control a PC from another PC, making keystrokes, eventually mouse-moves.
- Even when starting up and e.g. entering the BIOS
- => ssh etc not an option
- you need to be independent from any "client" on the controlled machine
- only solution which comes to mind is : USB HID
- Therefore you connect from PC I somehow to PC II, on PC II as USB-Keyboard
+----------------+ +----------------+
| | | |
| PC I | | PC II |
| | +-------------+ | |
| (Controller) | USB | | USB | (Worker) |
| +--------->+ RubberJogi +-------->+ |
| | serial | | HID | |
| | +-------------+ | |
| | | |
+----------------+ +----------------+
- PC I connects to RubberJogi via USB-Serial
- RubberJogi injects Keystrokes etc via USB HID to PC II
-
Arduino ( with USB-Keyboard capability), e.g. Leonardo, Micro, etc
-
USB-TTL UART Converter , FTDI Serial
-
some cables


- As it is not possible to send CMD-Keys like ALT, CTRL via serial line, a language has to be used.
- Avoid to reinvent the wheel ==> Compatible to the famous RubberDucky-Script-Language
- ==> Based on arducky by Baptiste MOINE (Creased), THANKS!
- Parser is based on https://github.com/Creased/arducky/blob/master/arducky.ino
- is partially extended for also sending MOUSE-Movements
- is already extended to control four additional GPIO-Switches
- Accepted Commands :
- All RubberDucky-Commands (not really all...)
backspaceswitch1_on/switch1_off=> switching Optocoupler at Pin2switch2_on/switch2_off=> switching Optocoupler at Pin4switch3_on/switch3_off=> switching Optocoupler at Pin6switch4_on/switch4_off=> switching Optocoupler at Pin8boot=> switching Optocoupler at Pin2 for 1.5 sec high, then lowreboot=> switching Optocoupler at Pin2 for 10sec high, then low, after a delay of 2 secs then once more for 1.5 sec high, then lowaten=> switching Optocoupler at Pin4 for 1.5 sec high, then low
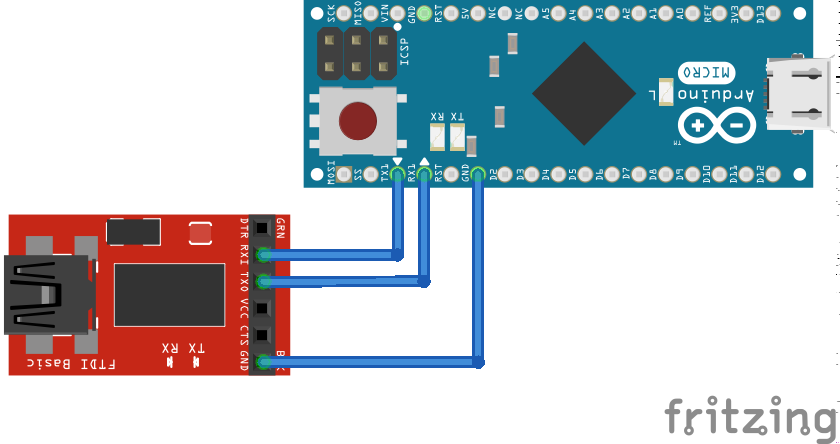
For "talking" to the RubberJogi from PC1 you need to configure your serial port to
- 9600 Baud
- 8 Bit, 1 Stop-Bit, No parity
If you are using a linux-box you could use the follwing command to achieve this:
stty -F /dev/ttyUSB0 cs8 9600 ignbrk -brkint -icrnl -imaxbel -opost -onlcr -isig -icanon -iexten -echo -echoe -echok -echoctl -echoke noflsh -ixon -crtscts
Then you can just try out the functionality of the box with e.g :
echo "ENTER" > /dev/ttyUSB0when you are allowed to use /dev/ttyUSB, orecho "ENTER" | sudo tee /dev/ttyUSB0when you need to be root to use /dev/ttyUSB
In both cases you should see a moving text-cursor on the second PC (best open an Editor...)
-
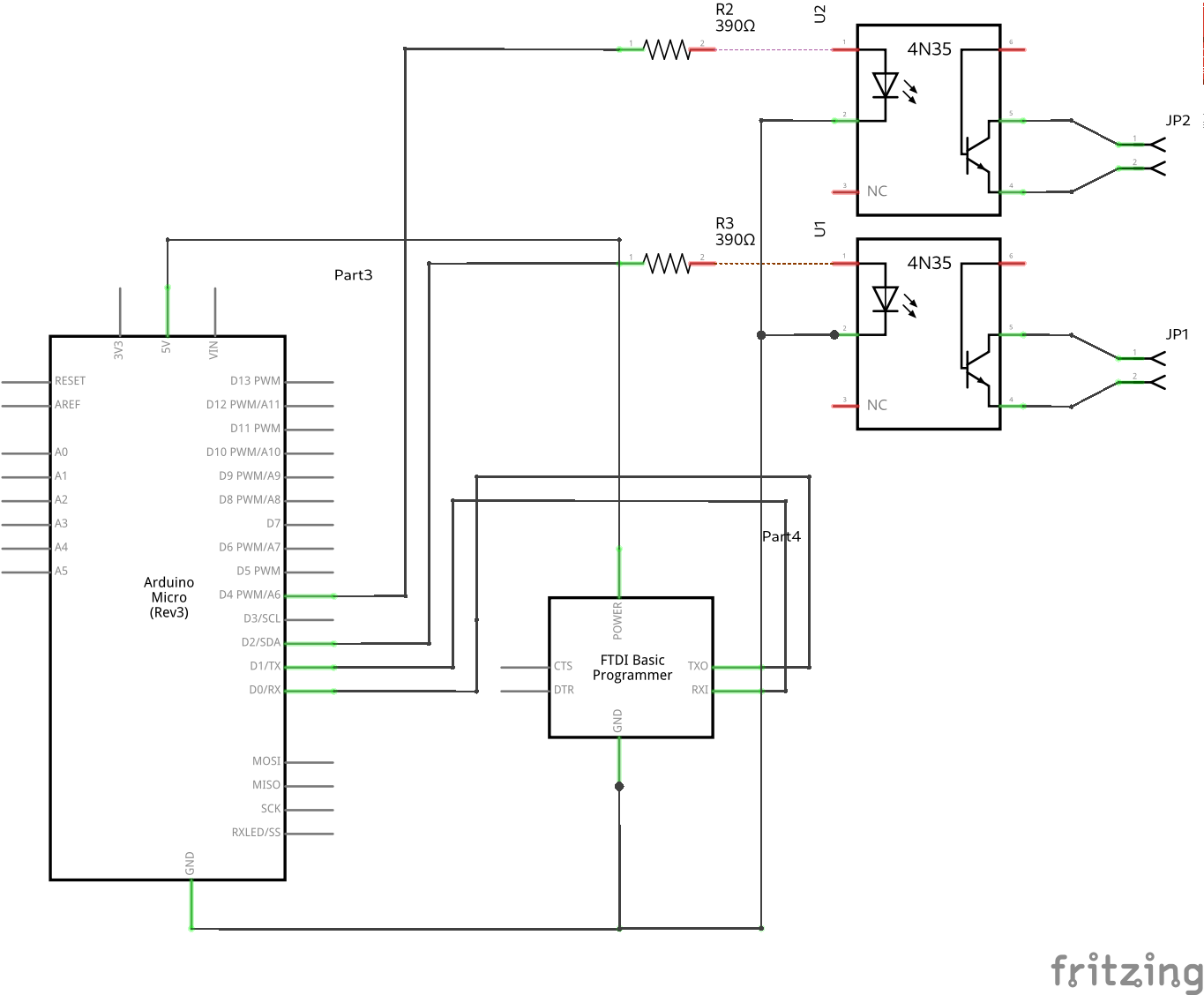
In our/my usecase we also need to control two switches
-
one of these is connected to the reset-button of the PC
-
the other one is connected to the switch of a USB-sharing station, so we can switch a USB-stick between PC1 and PC2 ...
-
more explanations will follow, the code is already able to make use of these
-
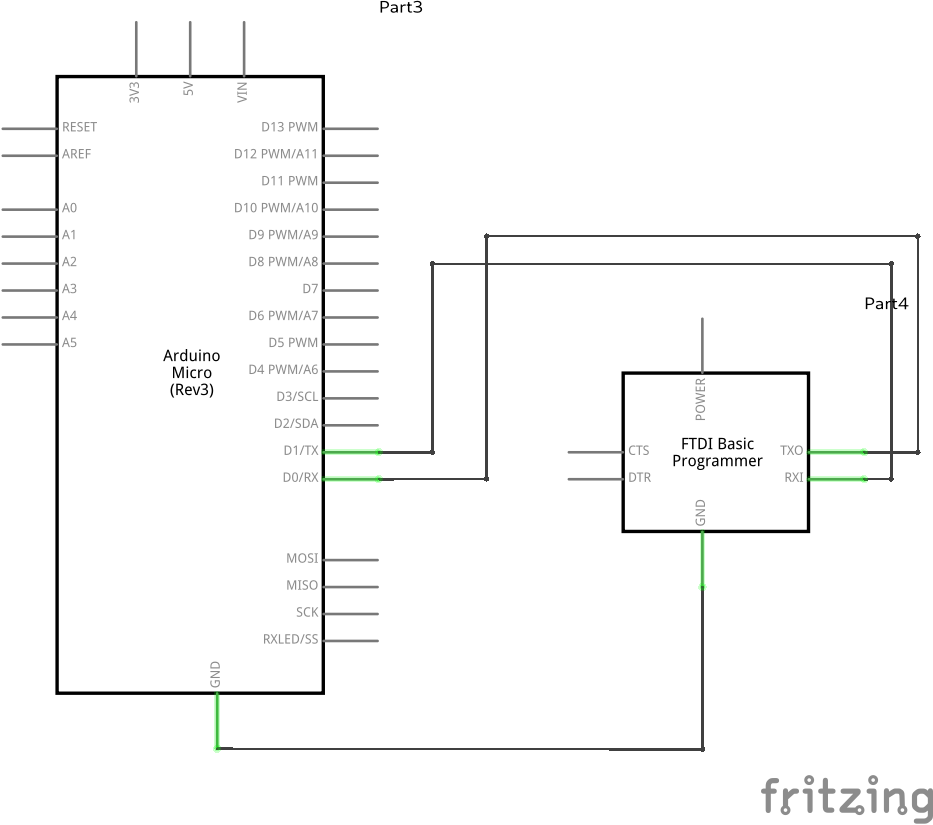
here at least are the schematics
-
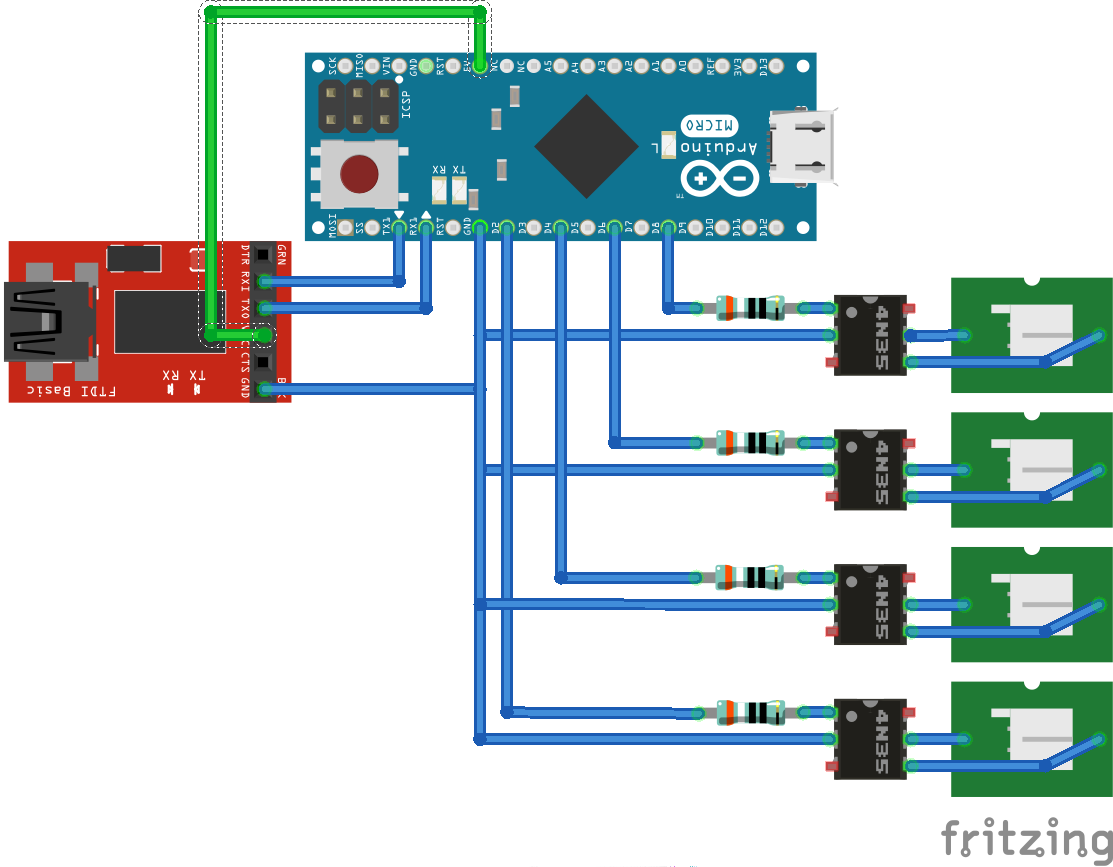
In case you want (like we do) to switch on PC2 with a command from PC1 you need to connect Vcc between FTDI and Arduino, otherwise the Arduino will not have power when he is connected to a switched of PC ... ( see the green cable below)
-
Unfortunately, it looks like this is backfeeding 5V even to the 2nd PC via USB. This is not a problem if the PC is switched on. BUT : If you have the PC switched off and want to switch it on, then - depending on the PC - it might make some trouble for the PC, as it is never really switching completely off. I need to try this remedy : https://forum.arduino.cc/t/powering-the-arduino-with-a-5v-power-supply/261902/12
-
We tried out this remedy (remove T1 of the ARDUINO) and it works perfect. BUT beware: when you want to re-programm the Arduino you NEED to have the FTDI connected as well to a PC, as otherwise the Arduino is not powered...
-
See here the location of the T1 to be removed:
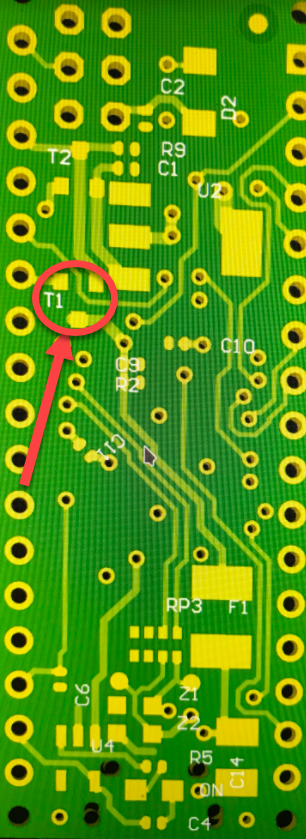



-
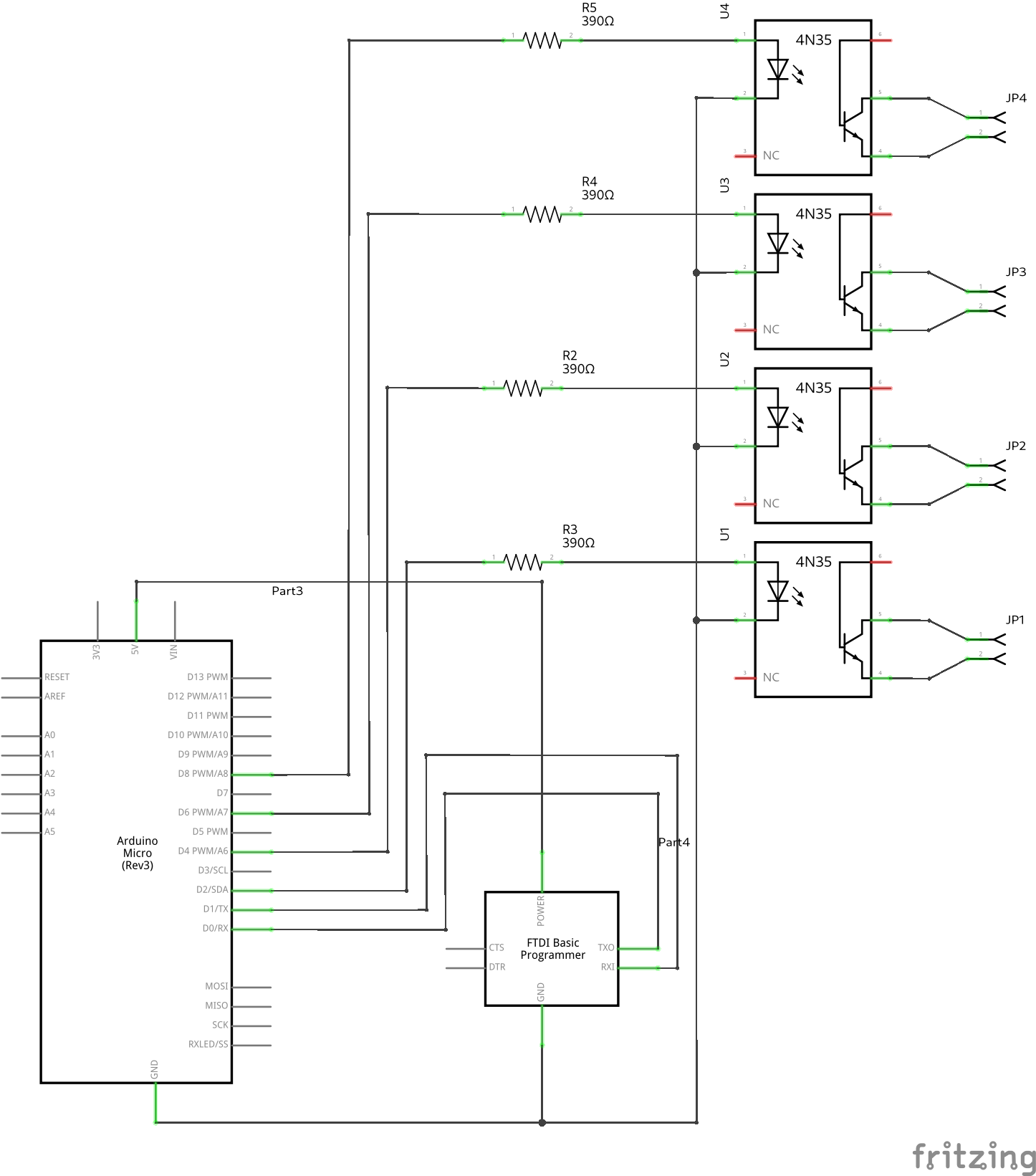
in the meantime we even have use-cases where we need to control up to 4 switches
-
as before one of these is connected to the reset-button of the PC (in our case)
-
as before one is connected to the switch of a USB-sharing station, so we can switch a USB-stick between PC1 and PC2 ... (in our case)
-
the other 2 switches are needed to control boot-sel switches of embedded ARM systems
-
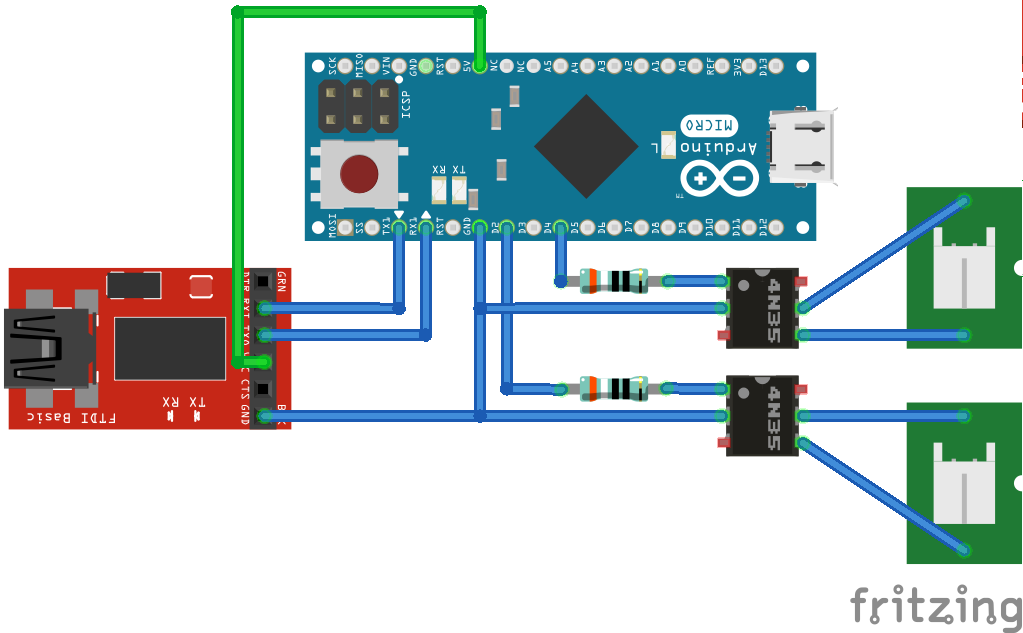
here are the additional schematics
-
In case you want (like we do) to switch on PC2 with a command from PC1 you need to connect Vcc between FTDI and Arduino, otherwise the Arduino will not have power when he is connected to a switched of PC ... ( see the green cable below)
-
backfeeding 5V via USB to PC2: see above at the 2-Switch-Solution)


- finally (in our application) we need to switch power
- we introduced a 5th optocoupler, connected to pin10 AND we connected a real relay to that to be able to switch power
- schematics will follow
This is one sample-prototype without any switches, just the "plain" RubberJogi. This was soldered "flying" and is only stabilized with heat shrink tube.

This is one sample-prototype, with 4 switches, soldered on a veroboard/breadboard

These are all 3 prototypes I have built, together on one picture.
- 2 times extended RubberJogis with 4 switches
- 1 as a pure RubberJogi, no switches.

What do you need to build a RubberJogi?
| Part | Rubber Jogi Standard |
Rubber Jogi Two Switch |
Rubber Jogi Four Switch |
|---|---|---|---|
| Arduino Micro | 1 | 1 | 1 |
| FTDI USB / Serial Converter 5V capable | 1 | 1 | 1 |
| Cables between Arduino/FTDI (Vcc, GND, RxD, TxD) |
4 | 4 | 4 |
| USB-Cable to Arduino (USB-A to Micro-USB) |
1 | 1 | 1 |
| USB-Cable to FTDI (USB-A to Mini-USB) |
1 | 1 | 1 |
| Veroboard | ? | ca 60x50 mm | ca 60x50mm |
| Header Arduino (when not using already w/ headers) |
? | 34 | 34 |
| Header FTDI | ? | 18 | 18 |
| Optocoupler 4N25 DIL | 0 | 2 | 4 |
| Resistor 390 Ohm | 0 | 2 | 4 |
| Connectors, depends on your needs, e.g | 0 | 2 | 4 |
| Example: Headers for switches | 0 | 4 | 8 |
- Mouse-Support currently missing to 90%, positioning does not work. Maybe move to USB-Touch-Screen could solve the problem? Please have a look at this project, might be worth checking out : https://github.com/NicoHood/HID
- Another potential usefull link to solve the mouse-move would be : https://www.codeproject.com/Articles/1001891/A-USB-HID-Keyboard-Mouse-Touchscreen-emulator-with