
- Check if
scanorrealsense/scanfor a real robot and simulated?
- 01/02/2024: Remove
fake_localizationand thegen_poseoption. - 12/02/2023: Fix data normalization algorithm.
- 12/01/2023: Add
checkpointsaving option. The default isFalse. - 11/22/2023: Add
gen_poseoption forfake_localization. - 11/22/2023: Add
p3dandfake_localizationfor pose data. - 11/20/2023: Merge the
noetic-develbranch tomaster. - 11/20/2023: Add
scout_control_translator. - 11/19/2023: Add
joystick_translator. - 11/16/2023: Start Noetic version.
- 11/14/2023: Add several How-To's.
- 11/14/2023: Add
view_drive.pyavoiding a direct use ofdrive_view.py. - 11/12/2023: Add
test_drive.pyreplacing a direct use ofdrive_log.py. - 11/11/2023: Test in the latest TensorFlow.
- 11/11/2023: Change model format to Keras.
- 11/11/2023: Clean up.
- 10/31/2023: Start with submodules.
The following is a yaml file example for neural network training.
###############################################################################
# This is a jaerock's configuration for scout
# file name: <robot-name>-<person-name-who-trained-network>
# example: if jaerock trained network with data using the robot, scout
# the file name must be scout-jaerock.yaml
version: 1.00
# history
# 1.00 - start
######################################################
## neural network
# network definition
network_type: 3 # refer to neural_net/const.py
lstm: False
lstm_timestep: 20
lstm_lr: 0.00001 #
cnn_lr: 0.001 # default of Adam is 0.001
# normalize data
normalize_data: True
num_bins: 50
samples_per_bin: 1000
# training
data_shuffle: True
validation_rate: 0.3
num_epochs: 100
batch_size: 32
num_inputs: 1 # input: image, velocity
num_outputs: 1 # output: steering_angle, throttle
early_stopping_patience: 3
checkpoint: False
# tensorboard log dir
tensorboard_log_dir: logs/scalars/
# data augmentation
data_aug_flip: True
data_aug_bright: True
data_aug_shift: False
# input image size to the neural network
input_image_width: 160
input_image_height: 160
input_image_depth: 3
# steering data preprocessing
# - steering angle adjustment
steering_angle_scale: 1.0
# - steering wheel jitter tolerance
steering_angle_jitter_tolerance: 0.01
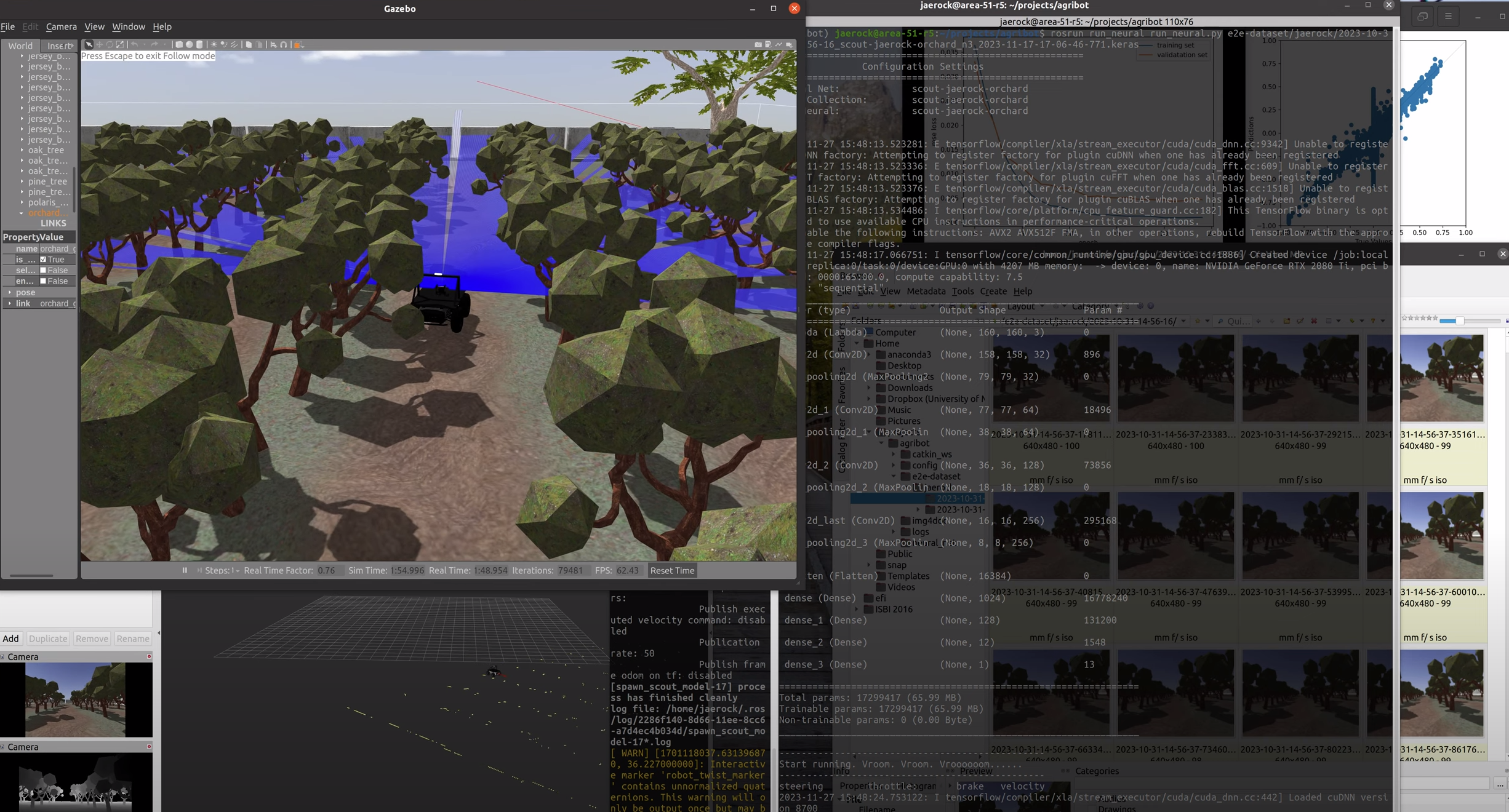
With the scout-jaerock-orchard_samples1000.yaml configuration, the training result is as follows.
 The total number of bins is 50 and the maximum samples per bin is 1000 for training data normalization.
The total number of bins is 50 and the maximum samples per bin is 1000 for training data normalization.
 The MSE loss curves are nicely smooth. The
The MSE loss curves are nicely smooth. The EarlyStopping callback was used.
 The prediction performance around zeo steering angle is overall good. But, it is not particularly good around zero steering. This might be able to be improved by adding more training data, where the robot is moving forward in the center of the orchard path.
The prediction performance around zeo steering angle is overall good. But, it is not particularly good around zero steering. This might be able to be improved by adding more training data, where the robot is moving forward in the center of the orchard path.
This repo has submodules. Please clone with the following command.
git clone --recurse-submodules https://github.com/jrkwon/agribotTo run agribot, you must install SDKs for sensors and additional packages, including YDLIDAR SDK and Cartographer. The details can be found https://github.com/jrkwon/agribot_ros.
Create the agribot conda environment.
Note:
We tested rospy.init_node() of ROS Noetic with Python 3.11. Well... init_node() never returns. We tried Pytnon 3.10 that works well with rospy.init_node(). Thus, this conda environment has Python 3.10.
conda env create --file config/conda/environment.yaml
./start_simul.sh launch_filename(without .launch)The name should be without the .launch file extension.
If scout_orchard_world is the launch file name (without the .launch extension)that you would like to use, do this.
./start_simul.sh scout_orchard_world Then, open another terminal.
Activate the agribot environment.
conda activate agribotThen source the setup.bash. You must be at the agribot directory when you do this.
source setup.bashIn the config directory, there are config-<name>.yaml files. You can choose which yaml should be used by changing the name CONFIG_FILENAME in neural_net/const.py
The default data location is agribot/e2e-dataset/<data-id>. If jaerock collected a data at 5:50:10 PM, Nov 12, 2023, then the directory name of the dataset is agribot/e2e-dataset/jaerock/2023-11-12-17-50-10.
cd path/to/agribot
source setup.bash
rosrun data_collection data_collection.py <data-id> If you have a separate storage to save data, you can set the path_to_e2e_data, which is a rosparm.
cd path/to/agribot
source setup.bash
rosparam set path_to_e2e_data path/to/location/to/save
rosrun data_collection data_collection.py <data-id> The data directory has a lot of images in most cases. So, it can be slow when you open the directory. Users need to open a CSV file inside the directory in many cases. Here is a script that can make a symblic link to the agribot/e2e-dataset/<data-id>.
cd path/to/agribot
sh make_simlink.sh path/to/data-dirNote:
- All checkpoint files are now saved at the
yy-mm-dd-hh-mm-ss_ckptdirectory inagribot/e2e-dataset/<data-id> - The trained model is saved as the latest Keras model.
- All pictures and csv files (comprison, err_hist, log, scatter) are generated with the format:
<dataset-dir-name>_<config_name>_<trained-model-name>_<timestamp>to identify when the training/driving was done with which dataset, which configuration, and which model. - When neural_net related scripts are run, you are expected at the
agribotdirectory.
Here is an example:
conda activate agribot
cd path/to/agribot
source setup.bash
python neural_net/train.py e2e-dataset/<id>/yyy-mm-dd-hh-mm-ssOnce you have a trained model, you can do a test drive with a dataset.
Let us assume followings as an example.
- data id:
jaerock - dataset name:
2023-10-31-14-56-16 - config name:
scout-jaerock-orchard--aug - network id:
3 - timestamp:
2023-11-12-16-25-31-079
Then, a trained model name is
2023-10-31-14-56-16_scout-jaerock-orchard--aug_n3_2023-11-12-16-25-31-079.keras
Let us test the model with a dataset. You may test the trained network with your training dataset for an initial trial. Then, you may test it with a test data set.
conda activate agribot
cd path/to/agribot
source setup.bash
python neural_net/test_drive.py path/to/model path/to/data-dirconda activate agribot
cd path/to/agribot
source setup.bash
python neural_net/test_run.py path/to/model path/to/imageconda activate agribot
cd path/to/agribot
source setup.bash
python neural_net/visualize_heatmap.py path/to/model path/to/image-
Generate images showing control signals.
conda activate agribot cd path/to/agribot source setup.bash python neural_net/view_drive.py path/to/model path/to/data-dir path/to/target-dir
The images will be generated under
path/to/target-dir/data-dir-name -
Generate mp4 using the generated images.
cd path/to/agribot sh make_video.sh path/to/target-dir/data-dir-nameCaution: Do not include
'/'at the last of the directory name.
The best practice is to
-
Start a Gazebo simulated world without any conda environment activated.
cd path/to/agribot source setup.bash ./start_simul.sh <launch name without '.launch'>
-
Open a new terminal.
-
Activate the
agribotconda environmentconda activate agribot
-
Start
run_neural.rosrun run_neural run_neural.py path/to/trained/model
-
On Ubuntu 20.04,
cv_bridgemay generate this error below.Traceback (most recent call last): File "/opt/ros/noetic/lib/python3/dist-packages/rospy/topics.py", line 750, in _invoke_callback cb(msg) File "/home/jaerock/projects/agribot/catkin_ws/src/run_neural/scripts/run_neural.py", line 67, in _controller_cb img = self.ic.imgmsg_to_opencv(image) File "/home/jaerock/projects/agribot/neural_net/image_converter.py", line 29, in imgmsg_to_opencv cv_img = self.bridge.imgmsg_to_cv2(img_msg, 'rgb8') File "/opt/ros/noetic/lib/python3/dist-packages/cv_bridge/core.py", line 163, in imgmsg_to_cv2 dtype, n_channels = self.encoding_to_dtype_with_channels(img_msg.encoding) File "/opt/ros/noetic/lib/python3/dist-packages/cv_bridge/core.py", line 99, in encoding_to_dtype_with_channels return self.cvtype2_to_dtype_with_channels(self.encoding_to_cvtype2(encoding)) File "/opt/ros/noetic/lib/python3/dist-packages/cv_bridge/core.py", line 91, in encoding_to_cvtype2 from cv_bridge.boost.cv_bridge_boost import getCvType ImportError: /lib/x86_64-linux-gnu/libp11-kit.so.0: undefined symbol: ffi_type_pointer, version LIBFFI_BASE_7.0
-
This is because
cv_bridgeis dynamically linked withlibffi.8notlibffi.7. Remove that library.rm ${CONDA_PREFIX}/lib/libffi.7.so ${CONDA_PREFIX}/lib/libffi.so.7
- Jaerock Kwon, PhD, Assistant Professor, Electrical and Computer Engineering, University of Michigan-Dearborn
- Elahe Delavari, PhD student, Electrical and Computer Engineering, University of Michigan-Dearborn
- Feeza Khanzada, PhD student, Electrical and Computer Engineering, University of Michigan-Dearborn