This repo is aim to extract partial point clouds within labeled 3D bounding boxes. Currently, the KITTI dataset is supported.
- Please download the official KITTI 3D object
detection
dataset and organize the downloaded files as follows:
├── kitti │ │── ImageSets │ │── training │ │ ├──calib & velodyne & label_2 & image_2 │ │── testing │ │ ├──calib & velodyne & image_2 │ ├── extract_partial_point_clouds_from_kitti.py ├── utils.py ├── visualize.py ├── calibration.py
-
Here we provide a quick demo to extract partial point clouds of cars from the point clouds saved in the
kitti/training/velodyne/000936.bin:python extract_partial_point_clouds_from_kitti.py \ --idx 000936 \ --category carEach individual 3D bounding box and the partial point clouds within it are saved in the
output/with the filename000936_car_{point or bbox}_0.npy. -
Visualization. Take the
000936_car_point_0.npyfor example:python visualize.py \ --idx 000936 \ --category car --i 0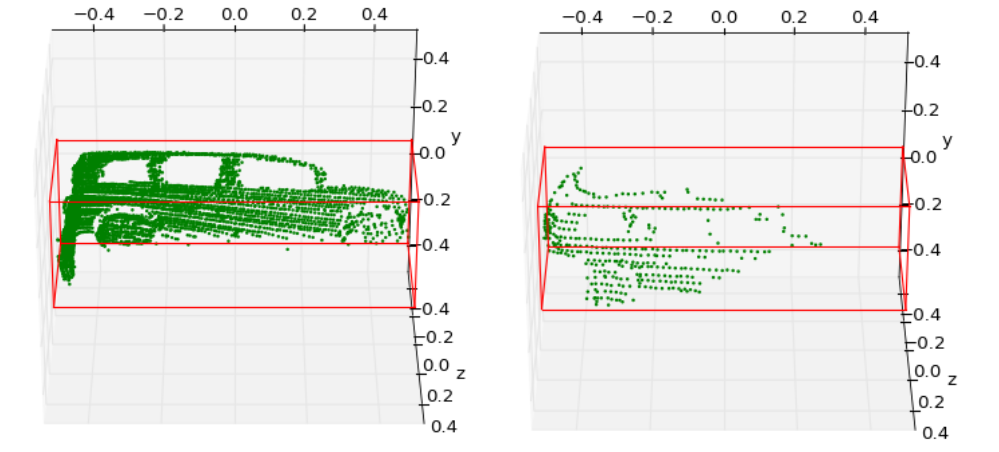

The output points clouds and bounding boxes are tranformed into the coordinate
system of Shapenet (x->forward, y->up) from kitti lidar (x->forward, z->up).
If you prefer no such tranformation, comment the following line in the
extract_partial_point_clouds_from_kitti.py:
...
box = bboxes[i]
points_canonical, box_canonical = utils.points_to_canonical(p, box)
# points_canonical, box_canonical = utils.lidar_to_shapenet(points_canonical, box_canonical)
pts_name = 'output/{}_{}_point_{}'.format(args.idx, args.category, i)
box_name = 'output/{}_{}_bbox_{}'.format(args.idx, args.category, i)
...