This repository contains the source code and documentation for a 2WD Robot RC using Arduino. The robot is controlled through a remote control and can move forward, backward, turn left, turn right, and stop.
The following hardware is required to build this project:
- Arduino UNO or similar board
- L298N motor driver
- Two DC motors
- HC-05 Bluetooth module
- 9V battery
- Breadboard and jumper wires
- Remote control (such as a smartphone with Bluetooth)
To install the software, follow these steps:
- Clone this repository:
git clone https://github.com/kareem-ghazi/2WD-Robot-RC.git - Connect the hardware components as shown in the diagram in the
schematic.png.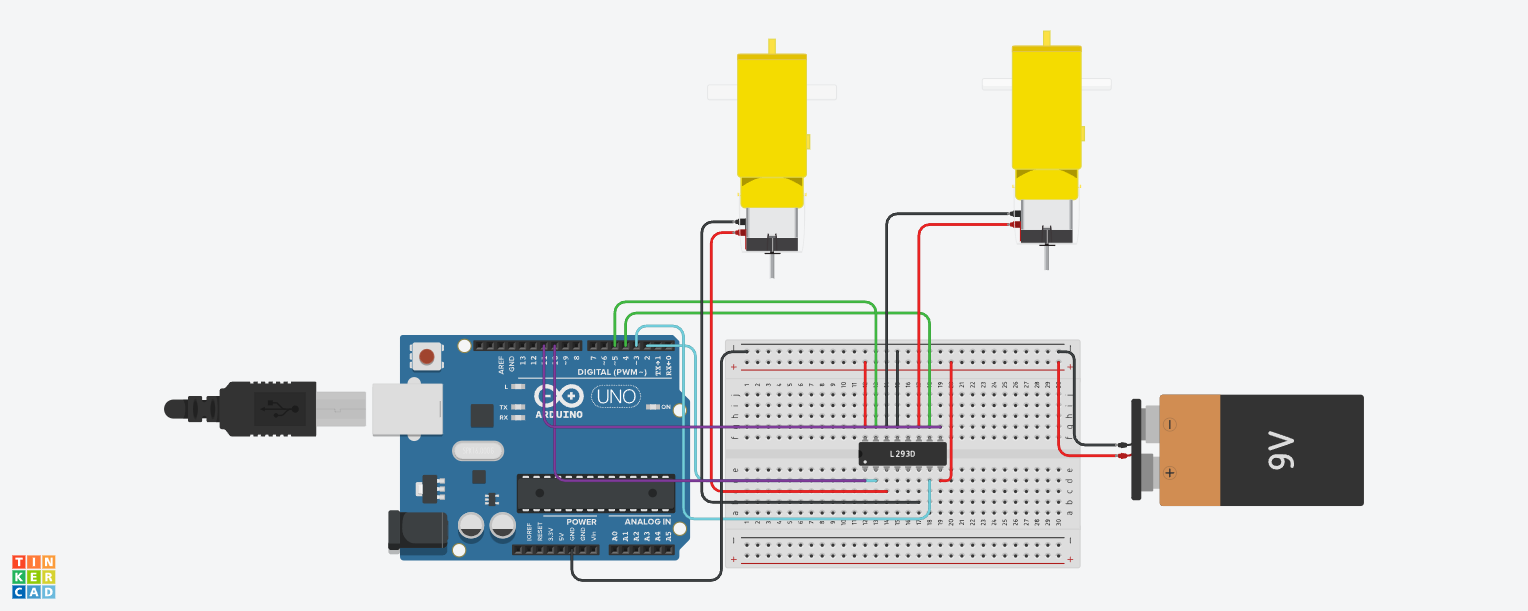
- Upload the
2wd-robot-rc.inosketch to the Arduino board using the Arduino IDE. - Install a Bluetooth terminal app on your remote control device.
- Pair the HC-05 Bluetooth module with the remote control device.
- Open the Bluetooth terminal app and connect to the HC-05 module.
- Use the app to send commands to the robot.

To use the robot, follow these steps:
- Turn on the robot and the remote control device.
- Open the Bluetooth terminal app and connect to the HC-05 module.
- Send commands to the robot using the app. The commands are:
F: Move forwardB: Move backwardL: Turn leftR: Turn rightS: Stop
- You can view a live simulaton of the project through the following link on Tinkercad
Contributions to this project are welcome. To contribute, please follow these steps:
- Fork this repository.
- Create a new branch:
git checkout -b my-new-branch - Make your changes and commit them:
git commit -am 'Add some feature' - Push to the branch:
git push origin my-new-branch - Submit a pull request.
This project is licensed under the MIT License. See the LICENSE file for details.