Kayley Seow's APCSA winter break project.
Shortcuts: Introduction, Photos and Demo, Slide Deck, Project Presentation.
TL;DR I made a ruler — just take a look at this beauty!

This repository contains my code to make the Digital Ruler using an Arduino Uno, a four seven-segment display, and a HC-SR04 (an ultrasonic ranging module) sensor. The entirety of the project was created and built during winter break as my submission for Project GradeBoost.
Here is a quick guide to the Digital Ruler repository. If you are looking for a specific file or want to know what each file is for, this should help you.
DigitalRuler.inois the main file containing the code I used to run my fully assembled Digital Ruler. Should be run using the Arduino IDE.HCSR04Test.inois code I write to test out and calibrate my HC-SR04 sensor to see if it was working. I added line 24 because my sensor was having trouble calibrating and I will explain why I did that later — you might want to consider doing something similar with your sensor.Test1.inois the first four seven-segment test file. This file tests the digits one at a time.Test2.inois the second four seven-segment test file. This file tests all the digits together.
- 1 Arduino Uno
- I borrowed it from Mr. B, which came in a kit from Vilros.
- 1 Breadboard
- 1 Four Seven-Segment Display
- 1 HC-SR04 Sensor
- 8 4-Band Resistors
- From my kit, I chose the resistors with 330 Ohms with ± 5% Tolerance (Orange Orange Brown Gold)
- You need 8 to control the 8 different parts of the Seven-Segment Display (7 segments + 1 for decimal point)
- 14 Jumper Wires (MM)
- Slide Deck with Photos
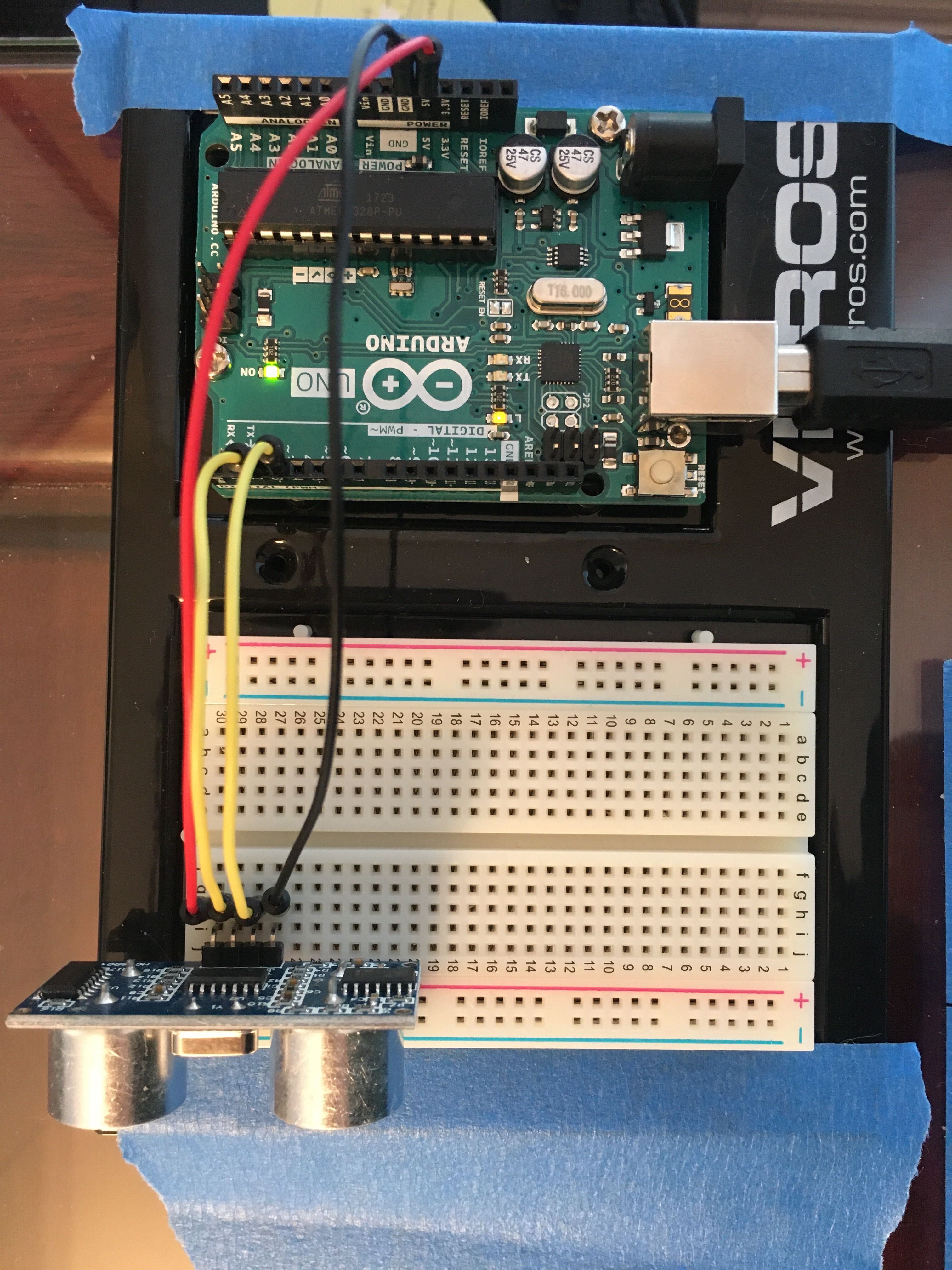
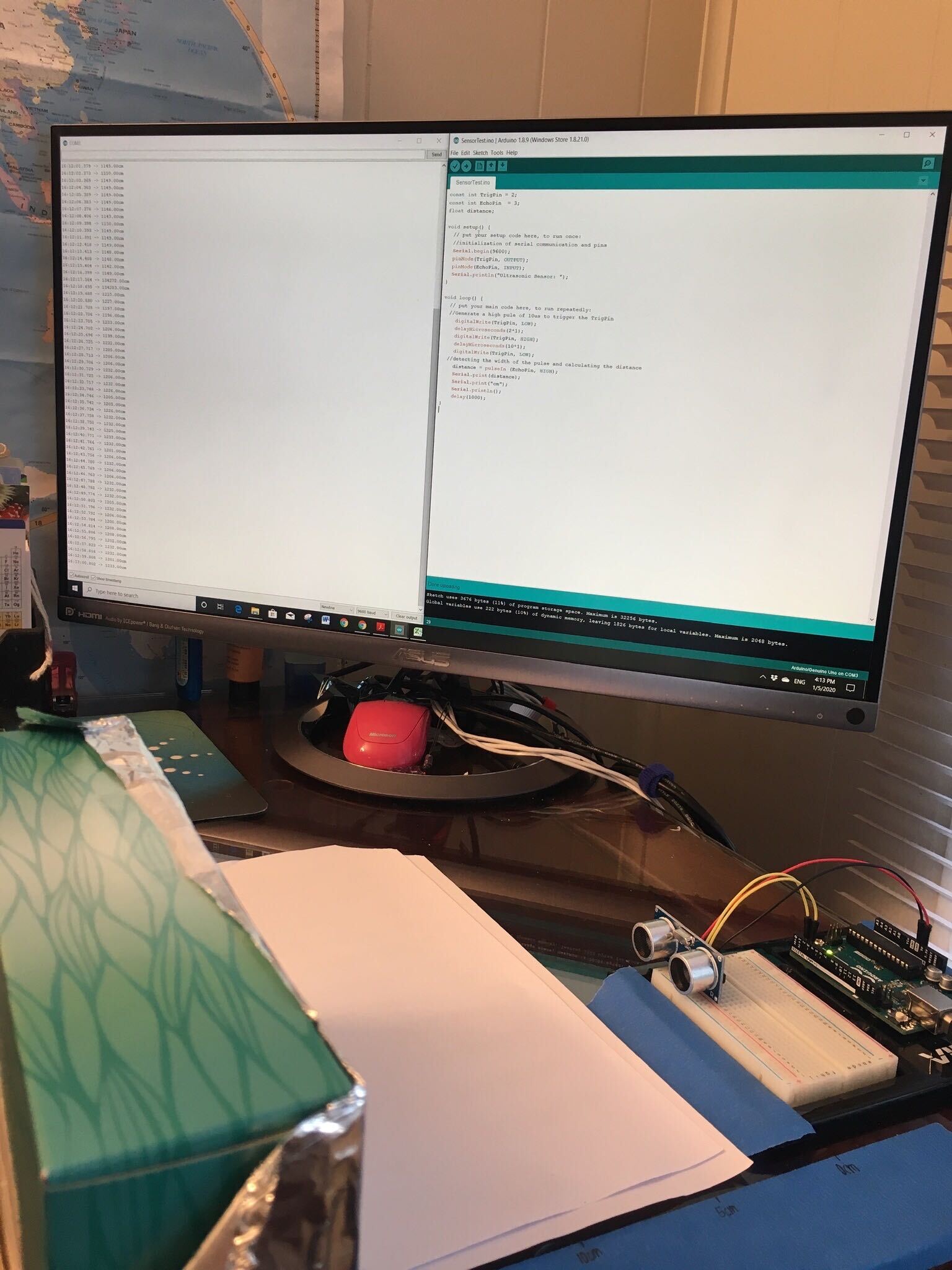
- Setup and Test of the HC-SR04 Sensor. Left to Right: Top view of HC-SR04 Sensor, Sensor Setup with Data on Monitor, Top View of the Sensor Setup.
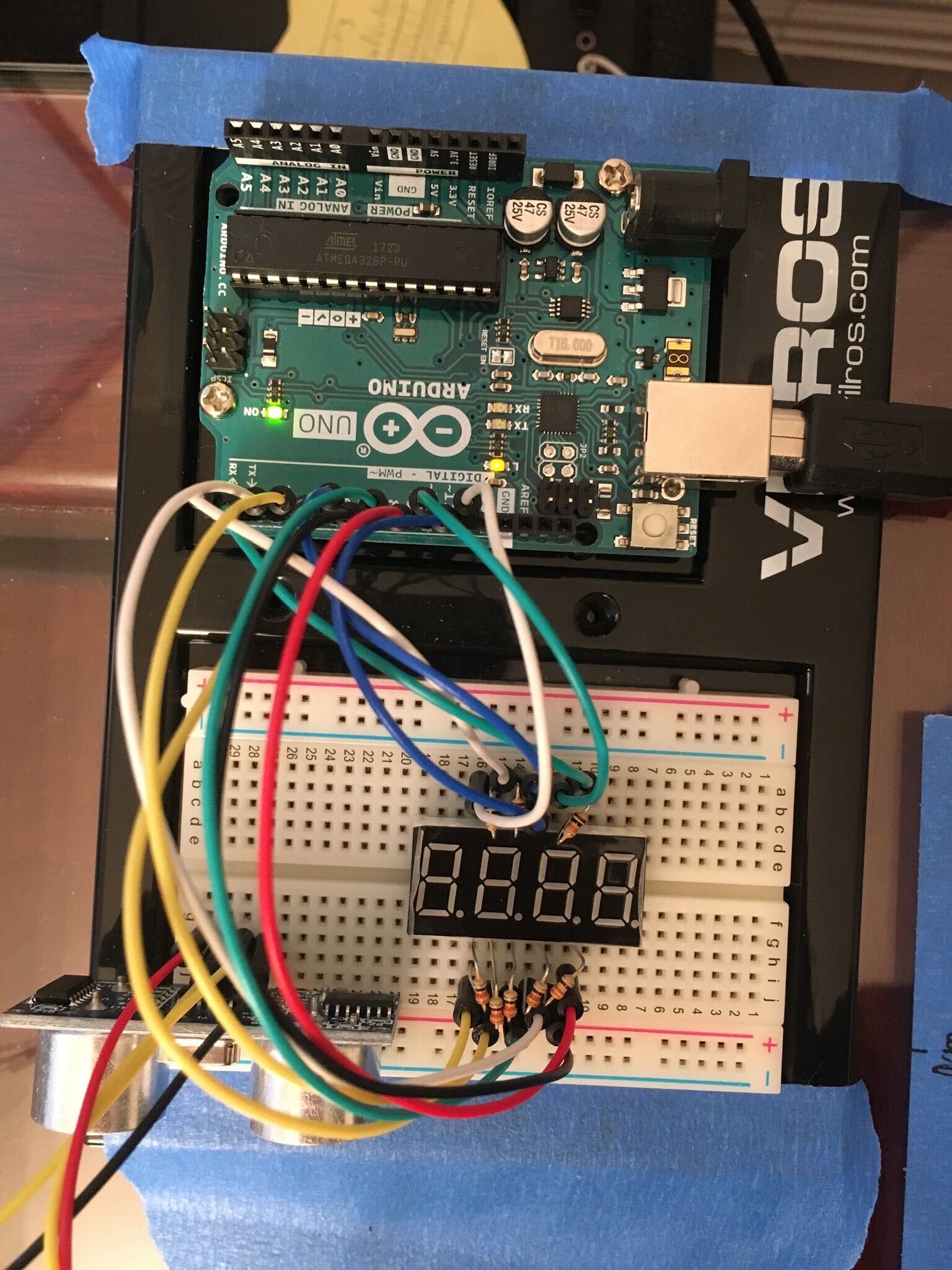
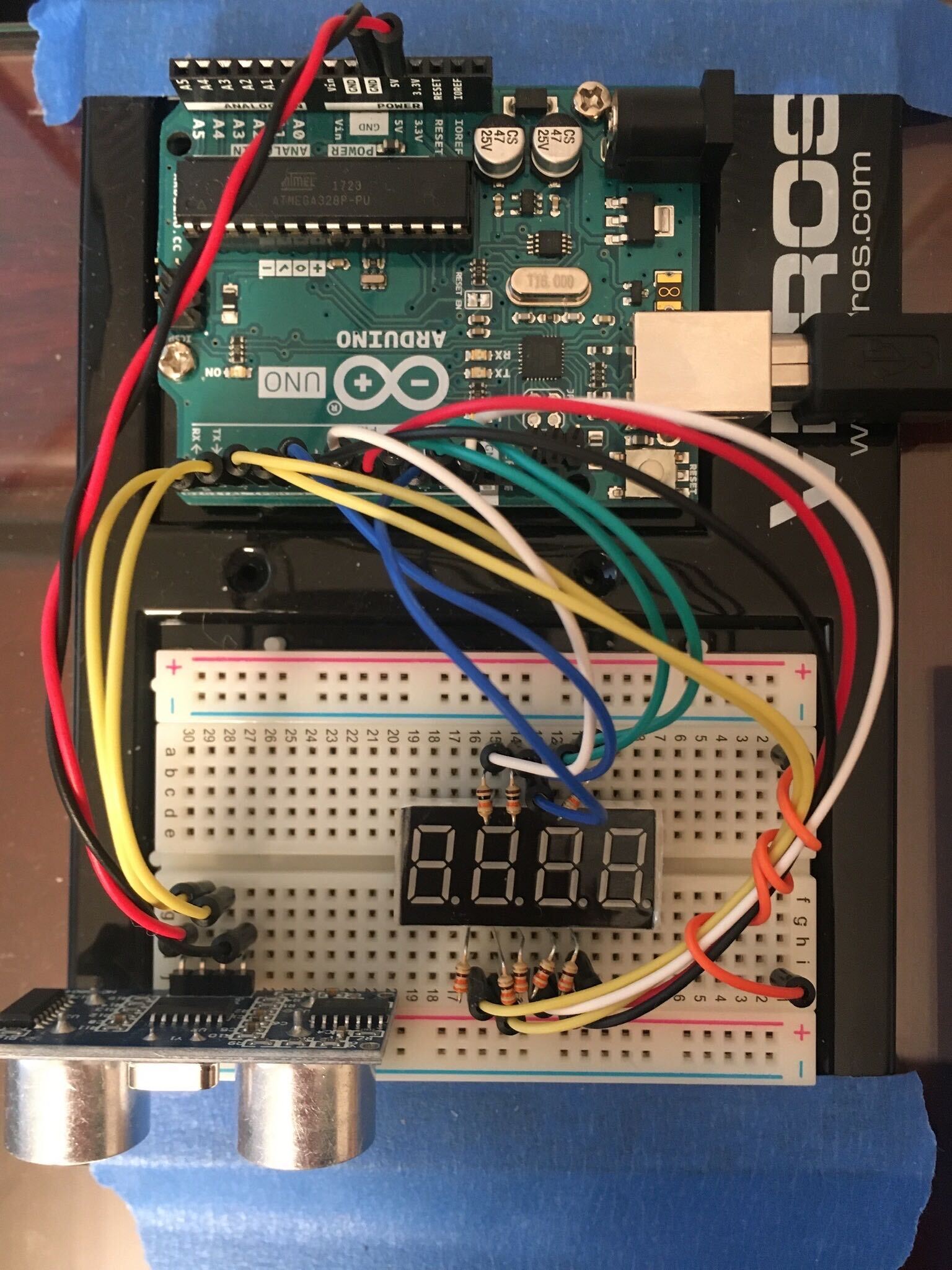
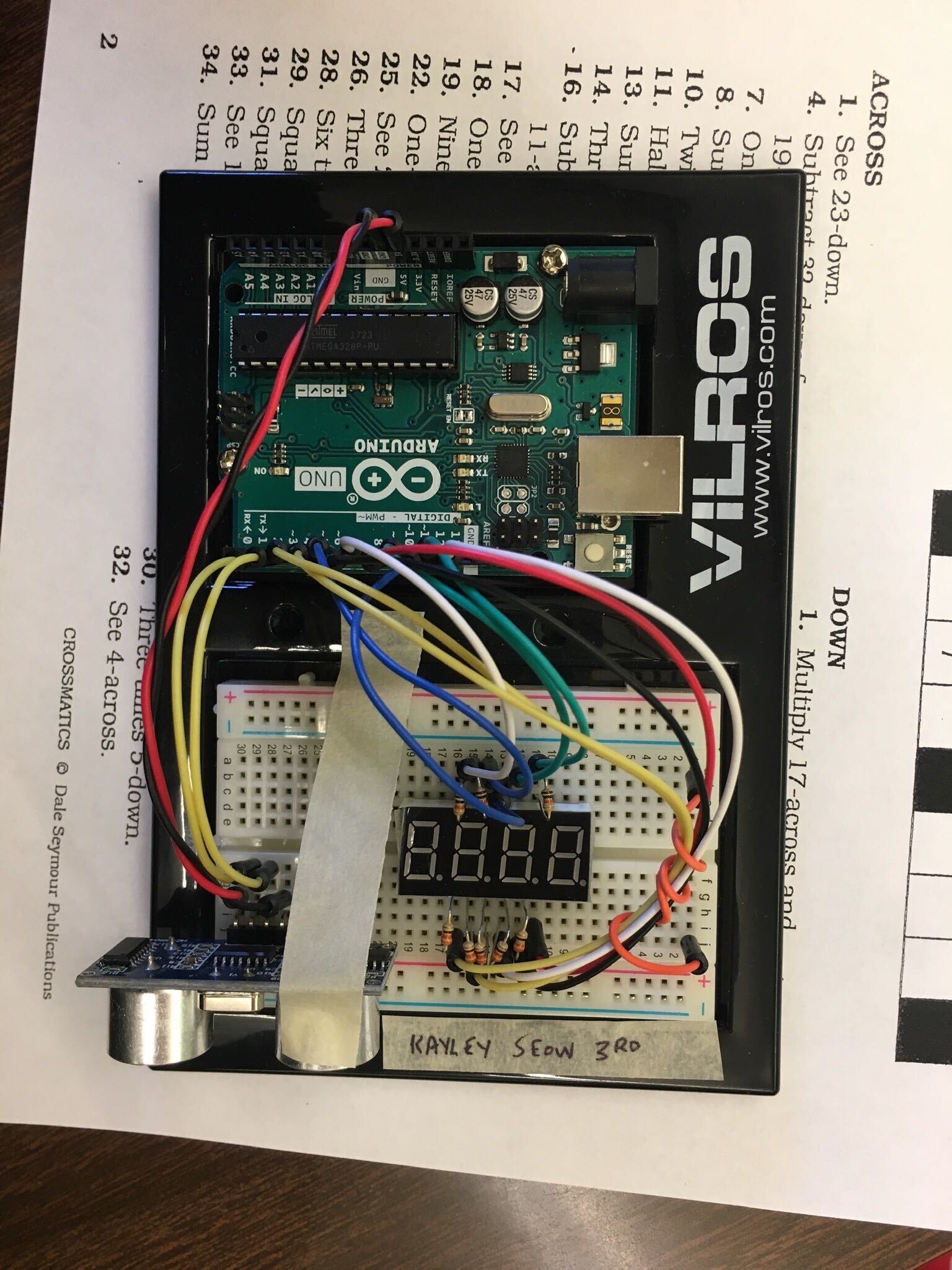
- Testing the Four Seven-Segment Display. Left to Right: Top View of FSSD, Testing the first digit of the FSSD, Testing all the digits of the FSSD, Combining both HC-SR04 Sensor and the Four Seven Segment Display (at this point the FSSD was not displaying the correct numbers).
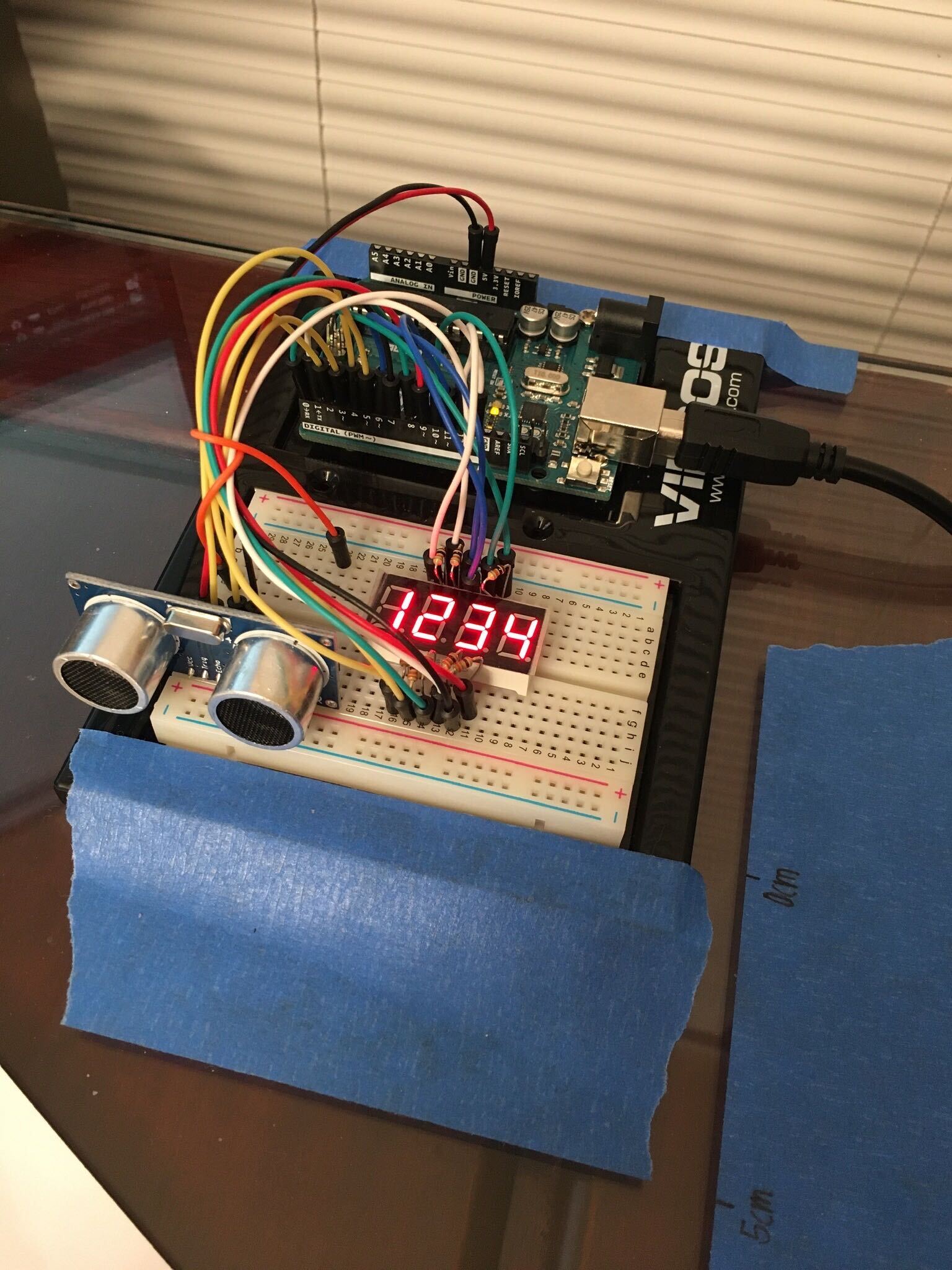
- Demo and Final Setup of the Digital Ruler. Left to Right: Demo of the Digital Ruler at 1cm increments, Demo of the Digital Ruler at a 5cm increment, Photo of the Complete Digital Ruler, Full photo of the complete Digital Ruler.











Project Presentation (Original Presentation)
- Arduino has its own open source IDE which sends code to the connected Arduino board
- I coded my project in C++, because that is the language which the Arduino can run on (it was a bit of a challenge for me)
- In the code, there is a void setup which sets out all the values needed (e.g. which pins are for what)
- There is a void loop which runs the code inside it indefinitely, or until the Arduino is stopped
- Need voltage in order to run
- +-, one is low, other is high
- In order to pass a current through, it has to be connected to positive
- Connected to pins, which give it the voltage
- Resistors help to determine brightness, so a large resistor is not as bright, vice versa
- Explained by the equation current = voltage/resistance
- The main thing about this display is to control the current
- The logic behind a four seven segment display is that you need to switch between all the digits really quickly in order to give the illusion of a stable display, something like a flipbook
- Measures from 2cm to 4 meters
- Receives and puts out signals to detect the length
- Trigger pin sends waves out and asks the unit to start to measure
- When the wave comes back it is recorded by echo pin and sent to the board, which measures out the actual distance
- The the input is a 10 microseconds ttl pulse
- By the way, ttl stands for transistor transistor logic
- Needs 5 volts to run, thus connected to the five volt pin
- The echo and the trigger pins are connected to pins 2 and 3
- The ground and voltage is also connected to the ground and the 5 volt
- My setup: I ran the code and marked tape along my desk in order to test out the sensor
- Problems with the sensor input
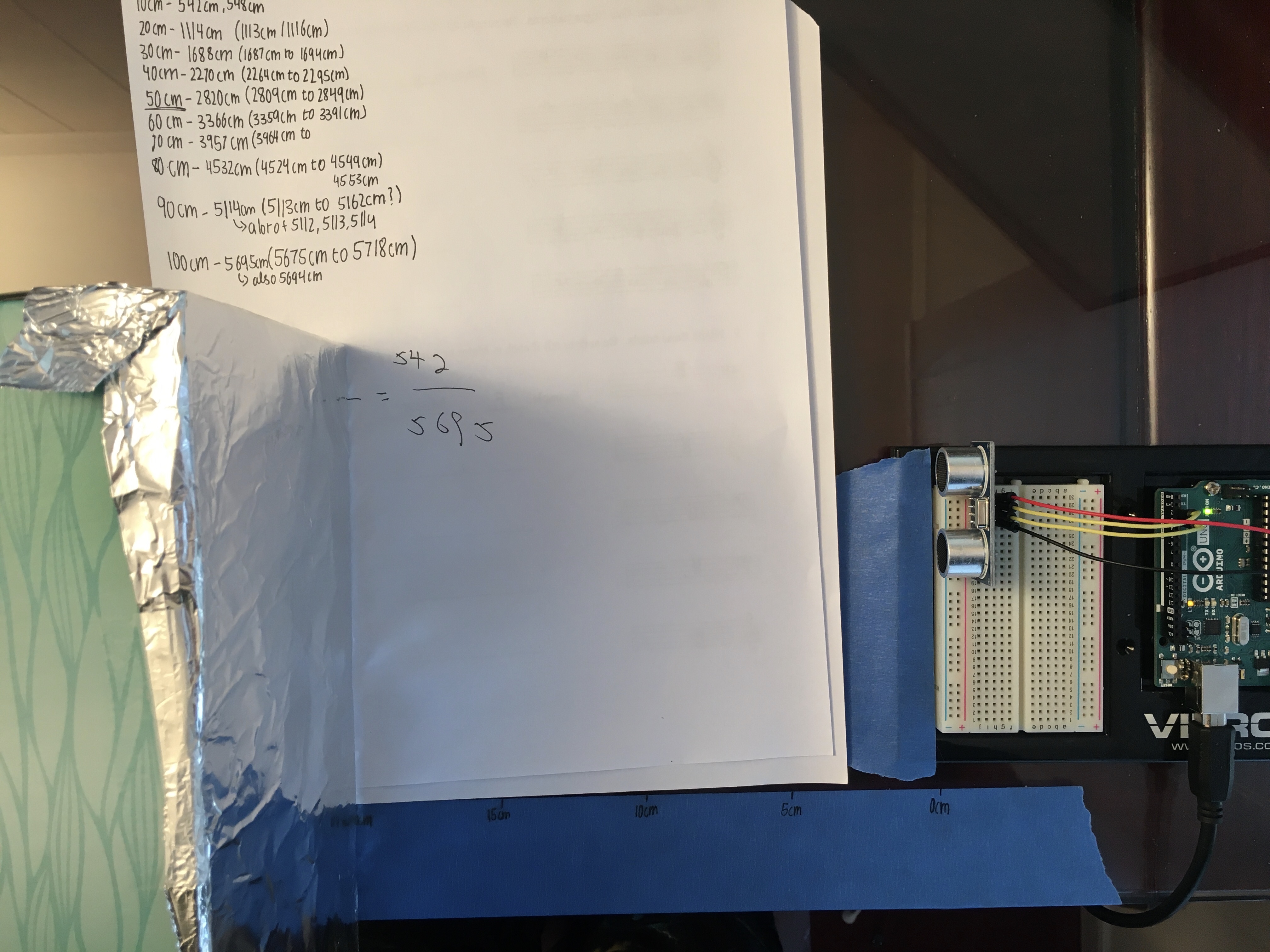
- The serial output for the original code was printing out wack values so I had to measure out distances, gather the values, and calibrate my code using resulting ratio
- Graph of actual distance vs. distance appearing on serial was linear, which meant I was able to get a ratio
- I averaged out the ratios and got my average adjustment factor, which I multiplied the actual distance by
- The logic: measured distance (distance appearing on serial) divided by average adjustment factor ≈ actual distance
- When I do not divide the distance by the calculated average adjustment factor, the values that are displayed are not correct (you can tell by the outrageous numbers)
- When I divide the distance by the calculated average adjustment factor, the values that are displayed are much more reasonable
- I tested the display separate to the ultrasonic sensor to see if it was working
- Tested two different ways, the first being testing the first digit and then testing the digits all together
- I did not run into any problems with my 4 seven-segment display
- I had problems with the display
- First, I was constricted to the 14 pins on the Arduino board
- The ultrasonic ranging module would not function if I used pins 0 or 1
- The display could not use pins 0 and 1 due to the interference from the ultrasonic ranging module thus, with two less pins to work with, I had to sacrifice the first digit and the decimal point
- The display can only display 1 digit at a time, so in order to create the illusion of a stable 4 digit display, I need to turn on one at a time and repeat at an extremely fast rate
- What I learned:
- How to code C++ in order to run the Arduino
- The debugging process for both hardware and software is extremely long and tedious, but the results are often rewarding
- How to work around my limitations, like the limited number of pins on my board
- Deeper knowledge of how my accessories work and how to troubleshoot them if problems arise and a new understanding of how my accessories interact with each other and the board