Linear Quadratic Regulators or LQRs are an optimal control strategy. Kalman filters are a form of optimal estimator. When these two are put together, this is known as Linear Quadratic Gaussian or LQG.
See figure 1 for the results of applying the controller to the drone and scroll further for the explanation.
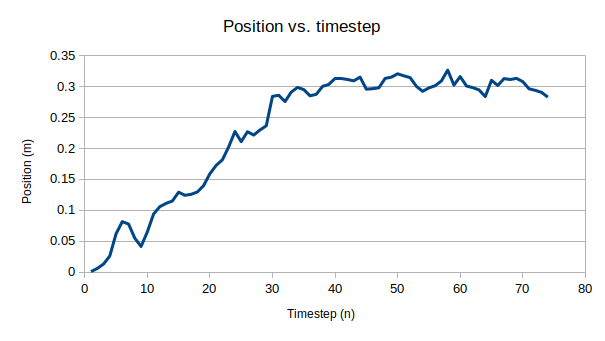
Figure 1: Control achieved
coming soon...