These are exercises from Path planning and Post processing. The code for PRM planner is written based on the pseudocode at here.
- scikit-learn = 0.24.2
- Shapely = 1.8.1
- numpy = 1.22.2
-
gitclone this repo.
-
conda env create -f osr_prm.yml
1. python PRM.py
or
2. python PRM.py -s 1000 -n 10 -r 10 --seed 4
n_sample - number of vertices to sample from map
n_neighbors - no of nearest vertices to connect
max_radius - max search space / maximum length of edges
seed - set seed value
map_width - map width
map_height - map height
n_obstacle - number of obstacle
output_image_path - path to save result
- Initial Map
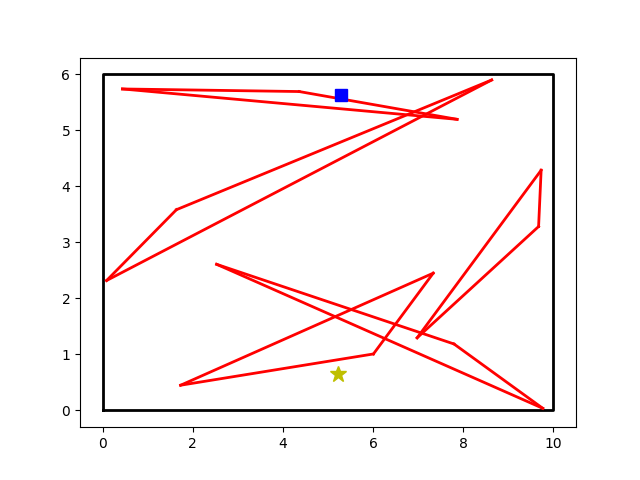 5 obstacles have been generated on the map. The blue cube is the starting point whereas the star is the ending point.
5 obstacles have been generated on the map. The blue cube is the starting point whereas the star is the ending point.

-
Generate edges with the points samples on the map
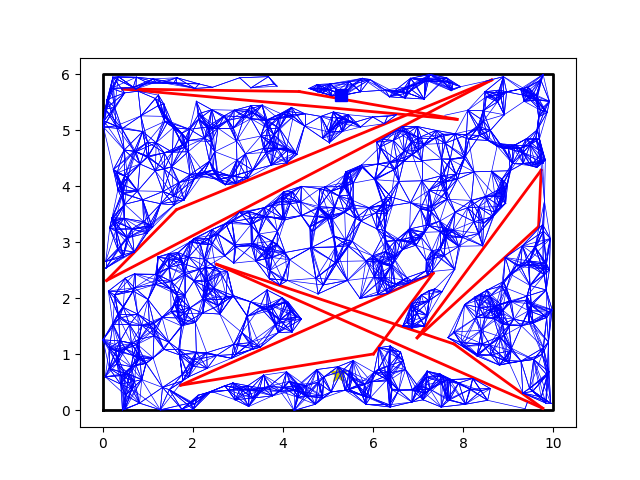 Random n points are sampled, collision-free edges are formed with the (n_neighbors) nearest numbers of vertices below max_radius.
Random n points are sampled, collision-free edges are formed with the (n_neighbors) nearest numbers of vertices below max_radius.
-
Shortest path from the connected edges
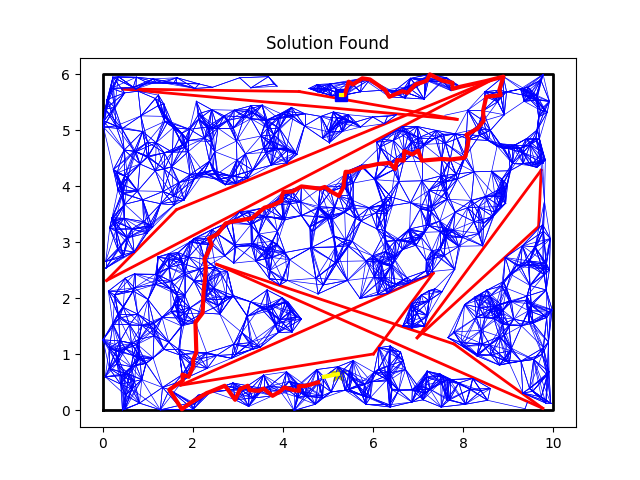 The starting point and goal are connected to the nearest vertex( yellow line), djikstra algorithm is used as a local planner to find the shortest path from starting point to the goal.
The starting point and goal are connected to the nearest vertex( yellow line), djikstra algorithm is used as a local planner to find the shortest path from starting point to the goal. -
Post-process path to improve the path
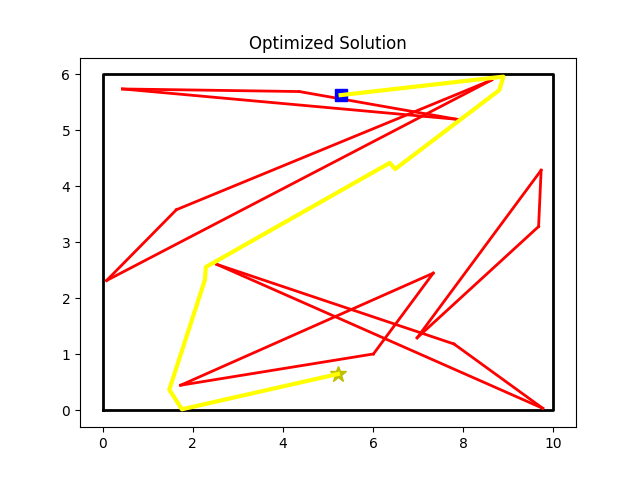 Using brute force(greedy search) to connect the points from starting points(left) to the ending points (right) without collision
Using brute force(greedy search) to connect the points from starting points(left) to the ending points (right) without collision


