Dynamic Gaussian Splatting SLAM (DGS-SLAM) is the first dynamic SLAM framework built on the foundation of Gaussian Splatting. While recent advancements in dense SLAM have leveraged Gaussian Splatting to enhance scene representation, most approaches assume a static environment, making them vulnerable to photometric and geometric inconsistencies caused by dynamic objects.
DGS-SLAM addresses these challenges by integrating a robust filtering process into the Gaussian Splatting pipeline. This framework effectively handles dynamic objects throughout the entire SLAM pipeline, including Gaussian insertion and keyframe selection, to achieve robust performance in dynamic environments.
This work is currently under review, and the code will be released soon. Stay tuned for updates!
The DGS-SLAM pipeline incorporates Gaussian Splatting, robust filtering, keyframe management, and loop-aware optimization. Below is a visual representation of the process:

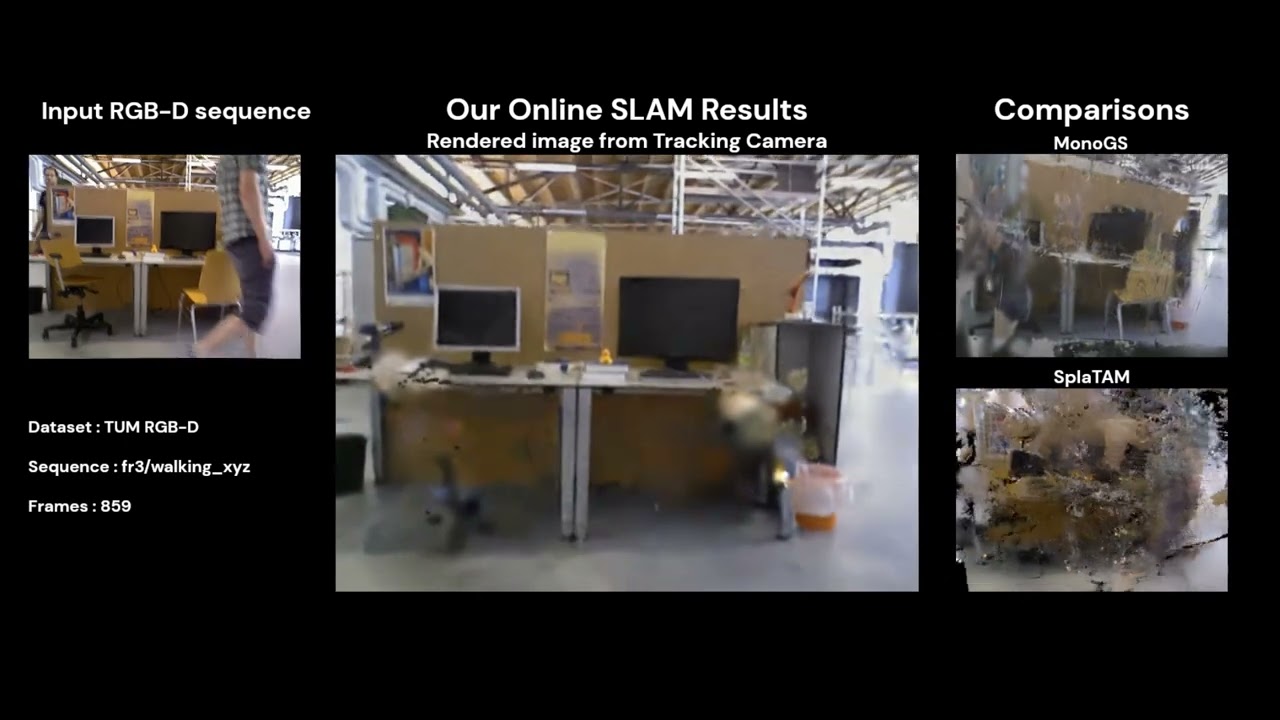
Check out the example videos below:
(Click the image to watch the video on YouTube)