This is test code of object tracking with MeArmPi.
You can do followings:
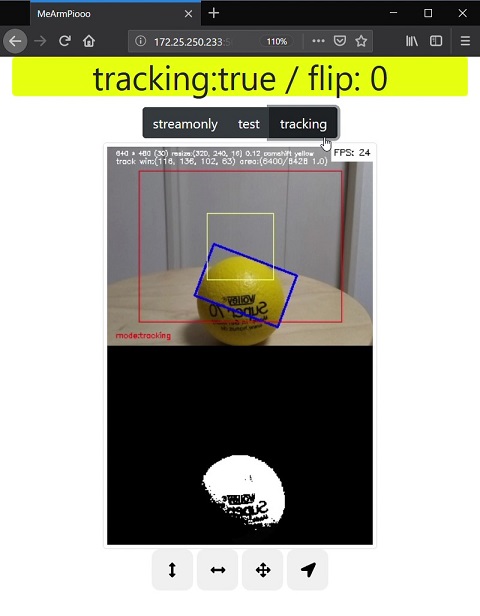
- Video streaming from Tello on your browser.
- Object / Color Tracking.
- Change tracking mode (streamonly, test, tracking).

browser image
MeaArmPi TechnicalOverview
This document is very helpful. Plese read this first and test demo code with your MeArmPi. https://groups.google.com/group/mearm/attach/18a4eb363ddaa/MeArmPiTechnicalOverviewV0-2DRAFT.pdf?part=0.1
Mearm(Python library)
https://gist.github.com/bjpirt/9666d8c623cb98e755c92f1fbeeb6118
Flask Video streaming
http://blog.miguelgrinberg.com/post/video-streaming-with-flask https://github.com/ECI-Robotics/opencv_remote_streaming_processing/
OpenCV (camshift sample code)
https://github.com/opencv/opencv/tree/master/samples/python
- MeArmPi
- Raspberry Pi 3B / PiCamera module V2
- Python 3.5
You need to install packages on Raspberry Pi
- OpenCV prerequisite libraries
sudo apt update
sudo apt install python3-pip -y
sudo apt install libatlas3-base libwebp6 libtiff5 libjasper1 libilmbase12 libopenexr22 -y
sudo apt install libgstreamer1.0-0 libavcodec57 libavformat57 libswscale4 libqtgui4 libqt4-test -y- Required packages with this app.
pip3 install opencv-python
pip3 install flaskMake sure that picamera is enabled (rasp-config) and modprobe bcm2835-v412.
sudo modprobe bcm2835-v4l2You must also start pigpiod daemon.
sudo pigpiodCommand Option
$ python3 app.py -h
usage: app.py [-h] [-a {camshift,meanshift}] [-s] [-t]
[-c {blue,red,yellow,green}]
opencv object tracking with MearmPi
optional arguments:
-h, --help show this help message and exit
-a {camshift,meanshift}, --algorithm {camshift,meanshift}
select object tracking algorithm
-s, --stream_only stream mode (without object traking)
-t, --test test mode (without moving arms)
-c {blue,red,yellow,green}, --color {blue,red,yellow,green}Define parameters in config.ini. you might need to adjust some parameters in your environment.
[camera]
# deifne frame resolution and frame rate.
# (320 * 240 16fps : recommend setting)
frame_prop = (320, 240, 16)
# initial track area
track_area = (80, 80)
.
.
.At first, your can run app.py with test option to confirm if settings are fine.
This example is Color(yellow) tracking.
python3 app.py -c yellow --testaccess to the streaming url with your browser
http://<your mearm ip addr>:5000/colors are defined in color.ini
# define hsv (hue, staturation, lightness)
[yellow]
lower = 20, 100, 100
upper = 40, 255, 255
.
.It is strongly suggested that you confirm if servo settings are correct with your MeArm Pi. Run app.py with the arms of MeArmPi removed from servos then you can see that servos move to the right direction.