Official Pytorch implementation of Continuous Object Representation Networks: Novel View Synthesis without Target View Supervision
Continuous Object Representation Networks (CORNs) are a continuous, 3D geometry aware scene representation that can be learned from as little as two images per object. CORNs represent object geometry and appearance by conditionally extracting global and local features and using transformation chains and 3D feature consistency as self-supervision, requiring 50×fewer data during training than the current state-of-the-art models. By formulating the problem of novel view synthesis as a neural rendering algorithm, CORNs are end-to-end trainable from only two source views, without access to 3D data or 2D target views. This formulation naturally generalizes across scenes, and our auto-encoder-decoder framework avoids latent code optimization at test time, improving inference speed drastically. Also check out the project website.
CORNs use a conditional feature encoder to extract global and local features from an input image. These features are combined with uniformally sampled 3D point coordinates and we learn a 3D feature representation that maps global features and local features to a 3D consistent feature space in world coordinates. As CORNs do not have access to the ground truth 2D target view, we construct a backward mapping trough our network to the second source images pose. During training, a CORN uses only two fixed source images per object, without 2D target view or 3D supervision.

This code was tested with python 3.7.6, pytorch 1.3.1 and torchvision 0.4.2. I recommend creating a pip virtual enviroment for dependecy management. You can create and environment with name "corn" with all dependencies like so:
- Create a virtual environment using python 3.7 in folder $HOME/virtualenvs/corn
virtualenv -p /usr/bin/python3.7 $HOME/virtualenvs/corn
- Activate the virtual environment
source $HOME/virtualenvs/corn/bin/activate
- Install requirements
pip install -r requirements.txt
The code is organized as follows:
- test.py contains the testing code for source to target view transformation
- test_srn.py contains the testing code to generate a series of views from an input view
- train.py contains the training code
- data/ contains the data loader code
- models/ contains the corn model
- options/ contains the train/test options
- utils/ contains utility functions
We make pre-trained models for the ShapeNet v2 car and chair datasets available. Please download them here.
The checkpoint is in the "checkpoints" directory - to load weights from the checkpoint, simply pass the full path to the checkpoint to the "--checkpoints_dir" command-line argument.
Three different datasets appear in the paper:
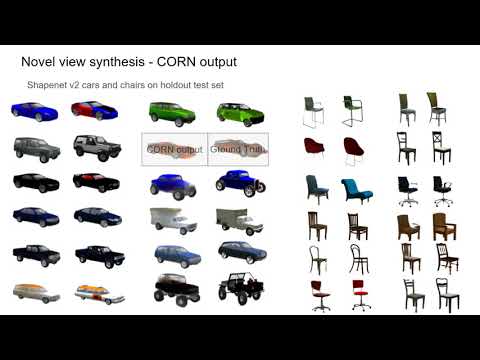
- ShapeNet v2 cars and chairs catergories
- Basel face dataset
Due to licensing issues, we are not able to share the basel face dataset images. Please download the ShapeNet cars and chairs datasets here.
See python train.py --help for all train options. Example train call:
python train.py --name [experiment name] \
--data_dir [path to directory containing train/val/test dataset]
--checkpoints_dir [path to directory where outputs are saved]
To monitor progess, the training code writes tensorboard summaries, prints to the console and writes example images to disk. Example images can be visualized with the output html file in the browser found in checkpoints directory.
For experiments described in the paper, configuration files are available that configure the commandline options according to the settings in the paper. You only need to adapt the paths.
See python test.py --help for all train options. Example test call:
python test.py --name [experiment name] \
--data_dir [path to directory containing train/val/test dataset]
--checkpoints_dir [path to directory where outputs are saved]
Again, for experiments described in the paper, config files are available that configure the command line flags according to the settings in the paper.
See python evaluation.py --help for all evaluation options. Example evaluation call:
python evaluation.py --src_dir [path to directory containing the test results]
Again, for experiments described in the paper, config files are available that configure the command line flags according to the settings in the paper.
If you find our work useful in your research, please cite:
@inproceedings{hani2020corn,
author = {H{\"a}ni, Nicolai
and Engin, Selim
and Chao, Jun-Jee,
and Isler, Volkan},
title = {Continuous Object Representation Networks:
Novel View Synthesis without Target View Supervision},
booktitle = {Advances in Neural Information Processing Systems (NeurIPS)},
year={2020}
}
If you have any questions, please email Nicolai Häni at haeni001@umn.edu.
Well, here is a Midwest 🌽 from Minnesota if you were here for the corn.