The official pytorch implementation of InconSeg: Residual-Guided Fusion With Inconsistent Multi-Modal Data for Negative and Positive Road Obstacles Segmentation. (RA-L).
We test our code in Python 3.7, CUDA 11.1, cuDNN 8, and PyTorch 1.7.1. We provide Dockerfile to build the docker image we used. You can modify the Dockerfile as you want.

The accompanied video can be found at:
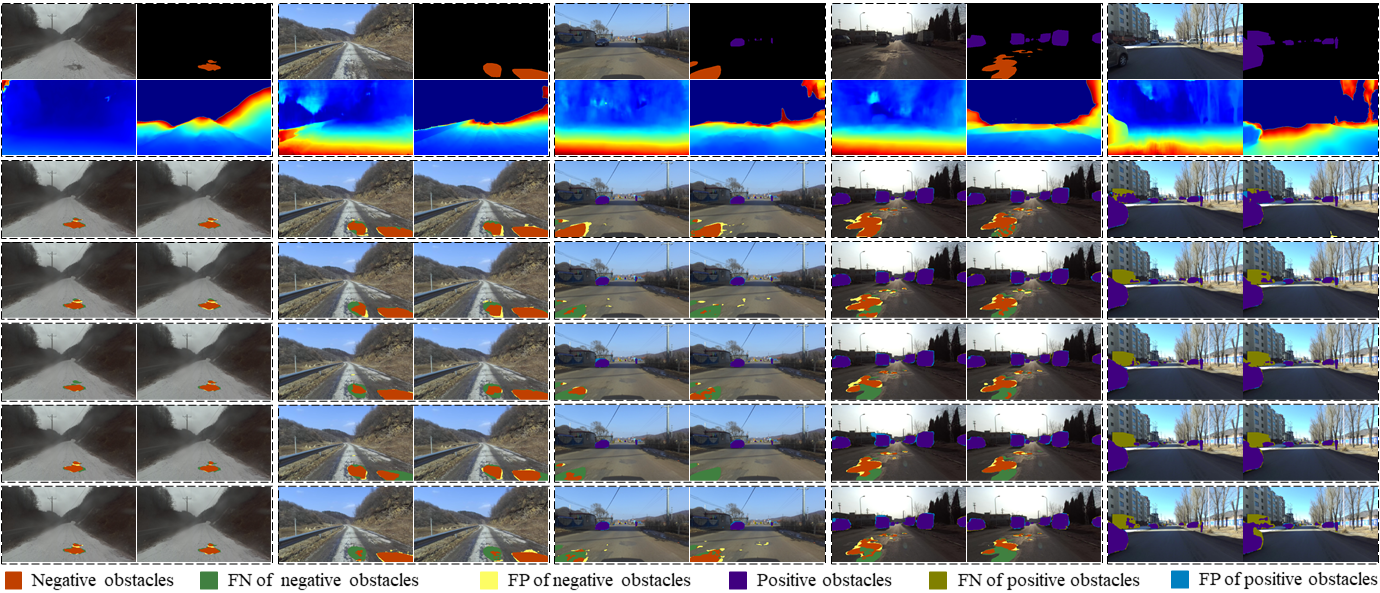
InconSeg is a network for the segmentation of positive obstacles and negative obstacles which can address the inconsistent information between two modalities with Residual-Guided Fusion modules
The NPO dataset can be downloaded from here.
The pretrained weight of InconSeg can be downloaded from here.
- Clone this repo
$ git clone https://github.com/lab-sun/InconSeg.git
- Build docker image
$ cd ~/InconSeg
$ docker build -t docker_image_inconseg .
- Download the dataset
$ (You should be in the InconSeg folder)
$ mkdir ./dataset
$ cd ./dataset
$ (download our preprocessed dataset.zip in this folder)
$ unzip -d . dataset.zip
- To reproduce our results, you need to download our pretrained weights.
$ (You should be in the InconSeg folder)
$ mkdir ./weights_backup
$ cd ./weights_backup
$ (download our preprocessed weights.zip in this folder)
$ unzip -d . weights.zip
$ docker run -it --shm-size 8G -p 1234:6006 --name docker_container_inconseg --gpus all -v ~/InconSeg:/workspace docker_image_inconseg
$ (currently, you should be in the docker)
$ cd /workspace
$ (To reproduce the results of RGB & Depth)
$ python3 run_demo_RGB_Depth.py
$ (To reproduce the results of RGB & Disparity)
$ python3 run_demo_RGB_Disparity.py
The results will be saved in the ./runs folder.
- To train InconSeg
$ (You should be in the InconSeg folder)
$ docker run -it --shm-size 8G -p 1234:6006 --name docker_container_inconseg --gpus all -v ~/InconSeg:/workspace docker_image_inconseg
$ (currently, you should be in the docker)
$ cd /workspace
$ (To train RGB & Depth)
$ python3 trainInconSeg_with_RGB_Depth.py
$ (To train RGB & Disparity)
$ python3 trainInconSeg_with_RGB_Disparity.py
- To see the training process
$ (fire up another terminal)
$ docker exec -it docker_container_inconseg /bin/bash
$ cd /workspace
$ tensorboard --bind_all --logdir=./runs/tensorboard_log/
$ (fire up your favorite browser with http://localhost:1234, you will see the tensorboard)
The results will be saved in the ./runs folder.
Note: Please change the smoothing factor in the Tensorboard webpage to 0.999, otherwise, you may not find the patterns from the noisy plots. If you have the error docker: Error response from daemon: could not select device driver, please first install NVIDIA Container Toolkit on your computer!
If you use InconSeg in your academic work, please cite:
@ARTICLE{feng2023inconseg,
author={Feng, Zhen and Guo, Yanning and Navarro-Alarcon, David and Lyu, Yueyong and Sun, Yuxiang},
journal={IEEE Robotics and Automation Letters},
title={InconSeg: Residual-Guided Fusion With Inconsistent Multi-Modal Data for Negative and Positive Road Obstacles Segmentation},
year={2023},
volume={8},
number={8},
pages={4871-4878},
doi={10.1109/LRA.2023.3272517}}
Some of the codes are borrowed from RTFNet