
-
Initialization: we can initialize the estimate location of the object using GPS data, randomly initialize the location of particles and their direction.
-
a particle contains the following information:
- x and y position
- orientation (motion direction)
-
-
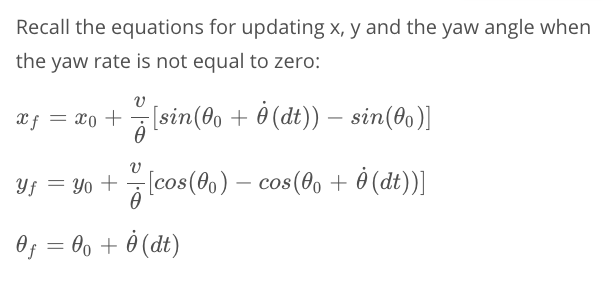
Prediction: use the motion model and the time of time (∆t) to predict the next location of every particle, and use the observation of each landmark to update the position of the landmarks in the internal map of each particle (particle observation).
-
Update: Calculate the weight of each particle through comparing the particle's landmark observations and with the landmark's true position. There are a few mini-steps:
-
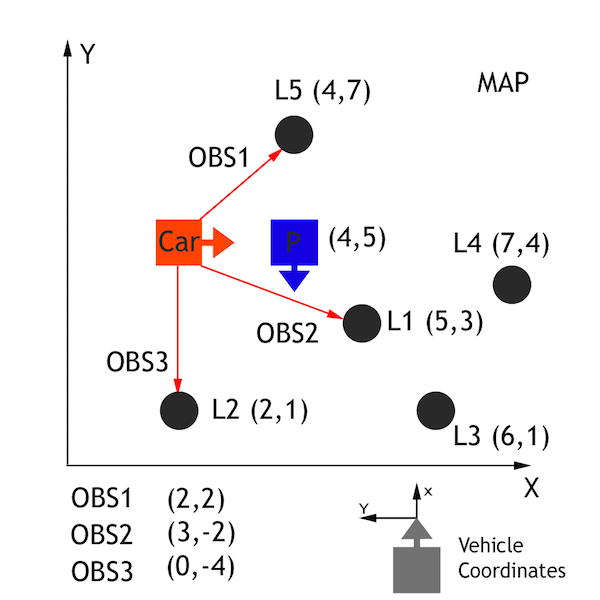
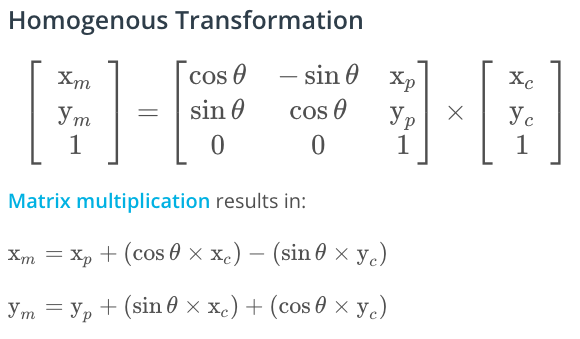
Transform landmark observations from vehicle's coordinate to map coordinate
We can use the equation below to do such transformation, usually the rotation angle -90 degrees.
-
Associate each observation with the closest landmark (ground truth)
-
Update the weight (probability store) of each particle with multivariate Gaussian distribution:
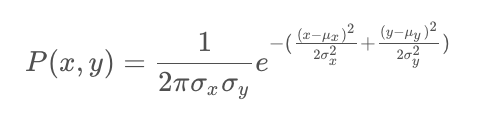
- µx: landmark's true x-position
- µy: landmark's true y-position
- x: particle's belief of the landmark's x-position (particle's x-position + landmark's observation)
- y: particle's belief of the landmark's y-position (particle's y-position + landmark's observation)
-
-
Resample: We can pick next generations of particles with a probability distribution according to their weight. We can use resampling wheel to do so. (In implementation we can use
std::discrete_distributionto avoid re-inventing the wheel).





 Your robot has been kidnapped and transported to a new location! Luckily it has a map of this location, a (noisy) GPS estimate of its initial location, and lots of (noisy) sensor and control data.
Your robot has been kidnapped and transported to a new location! Luckily it has a map of this location, a (noisy) GPS estimate of its initial location, and lots of (noisy) sensor and control data.
In this project you will implement a 2 dimensional particle filter in C++. Your particle filter will be given a map and some initial localization information (analogous to what a GPS would provide). At each time step your filter will also get observation and control data.
This project involves the Term 2 Simulator which can be downloaded here
This repository includes two files that can be used to set up and install uWebSocketIO for either Linux or Mac systems. For windows you can use either Docker, VMware, or even Windows 10 Bash on Ubuntu to install uWebSocketIO.
Once the install for uWebSocketIO is complete, the main program can be built and ran by doing the following from the project top directory.
- mkdir build
- cd build
- cmake ..
- make
- ./particle_filter
Alternatively some scripts have been included to streamline this process, these can be leveraged by executing the following in the top directory of the project:
- ./clean.sh
- ./build.sh
- ./run.sh
Tips for setting up your environment can be found here
Note that the programs that need to be written to accomplish the project are src/particle_filter.cpp, and particle_filter.h
The program main.cpp has already been filled out, but feel free to modify it.
Here is the main protocol that main.cpp uses for uWebSocketIO in communicating with the simulator.
INPUT: values provided by the simulator to the c++ program
// sense noisy position data from the simulator
["sense_x"]
["sense_y"]
["sense_theta"]
// get the previous velocity and yaw rate to predict the particle's transitioned state
["previous_velocity"]
["previous_yawrate"]
// receive noisy observation data from the simulator, in a respective list of x/y values
["sense_observations_x"]
["sense_observations_y"]
OUTPUT: values provided by the c++ program to the simulator
// best particle values used for calculating the error evaluation
["best_particle_x"]
["best_particle_y"]
["best_particle_theta"]
//Optional message data used for debugging particle's sensing and associations
// for respective (x,y) sensed positions ID label
["best_particle_associations"]
// for respective (x,y) sensed positions
["best_particle_sense_x"] <= list of sensed x positions
["best_particle_sense_y"] <= list of sensed y positions
Your job is to build out the methods in particle_filter.cpp until the simulator output says:
Success! Your particle filter passed!
The directory structure of this repository is as follows:
root
| build.sh
| clean.sh
| CMakeLists.txt
| README.md
| run.sh
|
|___data
| |
| | map_data.txt
|
|
|___src
| helper_functions.h
| main.cpp
| map.h
| particle_filter.cpp
| particle_filter.h
The only file you should modify is particle_filter.cpp in the src directory. The file contains the scaffolding of a ParticleFilter class and some associated methods. Read through the code, the comments, and the header file particle_filter.h to get a sense for what this code is expected to do.
If you are interested, take a look at src/main.cpp as well. This file contains the code that will actually be running your particle filter and calling the associated methods.
You can find the inputs to the particle filter in the data directory.
map_data.txt includes the position of landmarks (in meters) on an arbitrary Cartesian coordinate system. Each row has three columns
- x position
- y position
- landmark id
- Map data provided by 3D Mapping Solutions GmbH.
If your particle filter passes the current grading code in the simulator (you can make sure you have the current version at any time by doing a git pull), then you should pass!
The things the grading code is looking for are:
-
Accuracy: your particle filter should localize vehicle position and yaw to within the values specified in the parameters
max_translation_errorandmax_yaw_errorinsrc/main.cpp. -
Performance: your particle filter should complete execution within the time of 100 seconds.
A well written README file can enhance your project and portfolio. Develop your abilities to create professional README files by completing this free course.