Attempting to solve the LunarLander-v2 OpenAI Gym environment. For the time being, there are implementations for:
- Monte-Carlo
- Sarsa
- Q-learning
- DQN
These training snapshots are captured towards the end of the training phase (~10000 epsiodes). A random agent is also provided for comparison:
Random

Monte-Carlo

Sarsa

Q-learning

DQN

lr=0.1
lr=0.01
lr=0.001
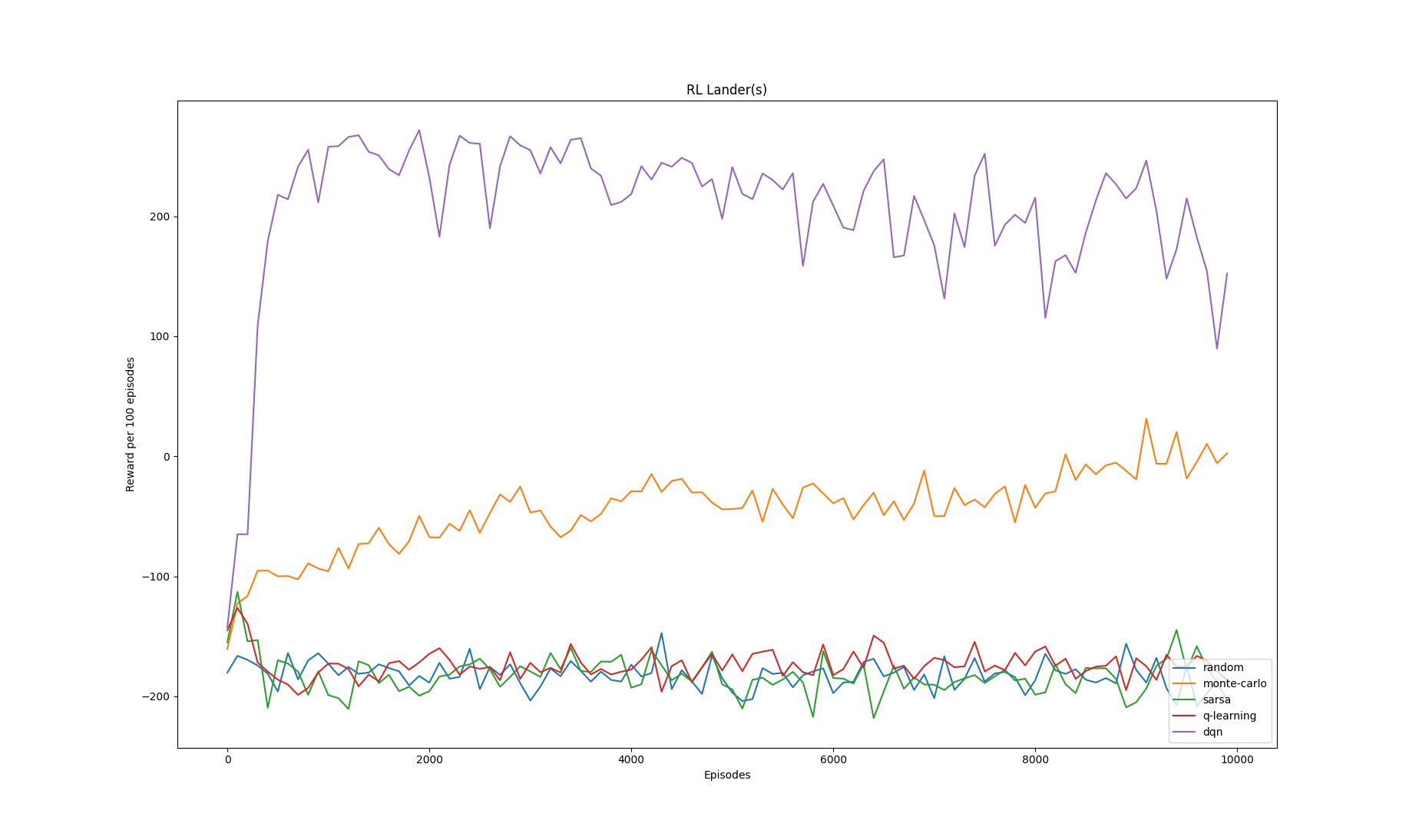



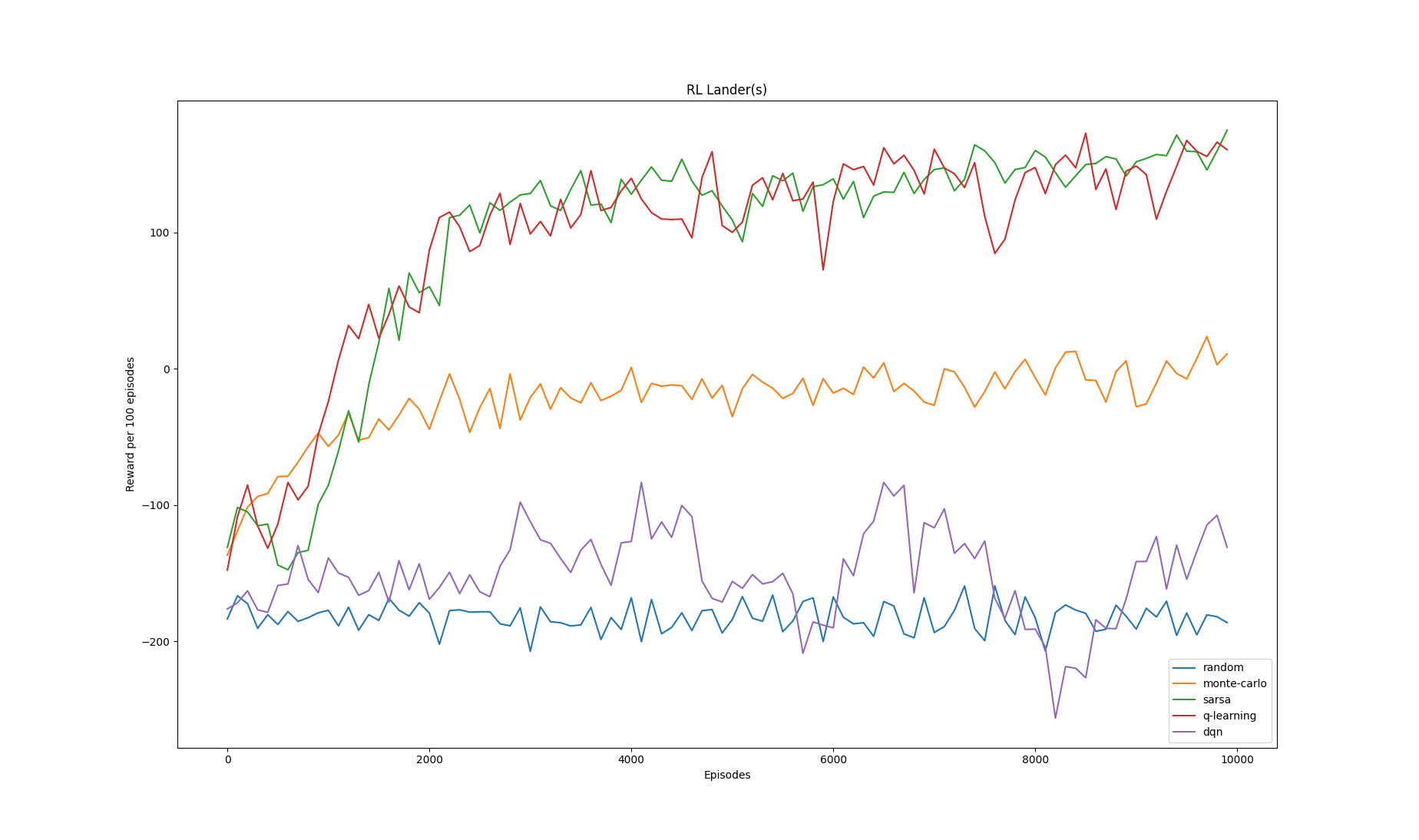
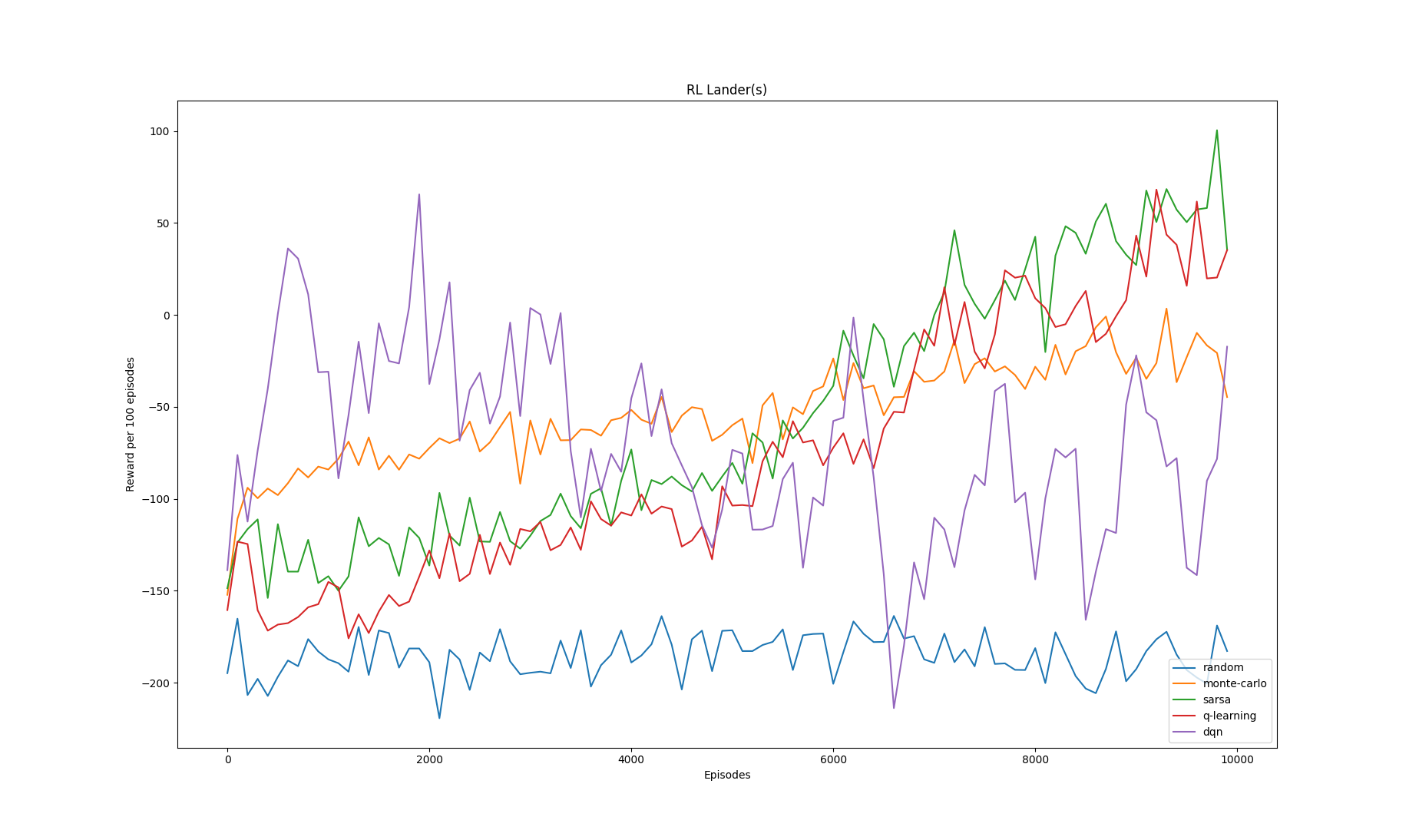
Note that the value of learning rate (equivalently the constant step-size parameter) only affects the performance of Sarsa, Q-learning and DQN. The Monte-Carlo variant implemented here is
called Every Visit Monte-Carlo and it uses a true running average in the policy evaluation step. Subsequently, learning rate does not have any effect on the algorithm's training progress.
For the 3 experiments conducted above, we compute the average reward for each rl algorithm (averaged across 10000 episodes of training)
| Learning rate=0.1 | Learning rate=0.01 | Learning rate=0.001 | |
|---|---|---|---|
| Monte-Carlo | -23.134 | -53.209 | -44.191 |
| Sarsa | 95.445 | -55.731 | -182.449 |
| Q-learning | 95.793 | -77.473 | -173.590 |
| DQN | -150.694 | -70.869 | 206.948 |
The purpose of this project is to compare the performance of the rl algorithms implemented. So, for a complete comparison, meaning that all of the above agents are trained during program execution, run the following:
python train.py --agents random monte-carlo sarsa q-learning dqn
this will train each agent separately using default values, which are
n_episodes=10000, lr=0.001, gamma=0.99, final_eps=0.01.
For a more customized execution, you can explicitly provide the value for each argument. For example, to only train a dqn agent:
python train.py --agents dqn --n_episodes 3000 --lr 0.0001 --gamma 0.99 --final_eps 0.02
After training a dqn agent, you can test how well it generalizes using:
python autopilot.py <num_episodes> models/*/qnetwork_{*}.pt
To compare dqn to a random agent:
python random_agent.py <num_episodes>
- LunarLander-v2/models/pretrained/qnetwork_2000.pt lands the lunar lander optimally 95% of the time