Here the executed changes are listed.
-
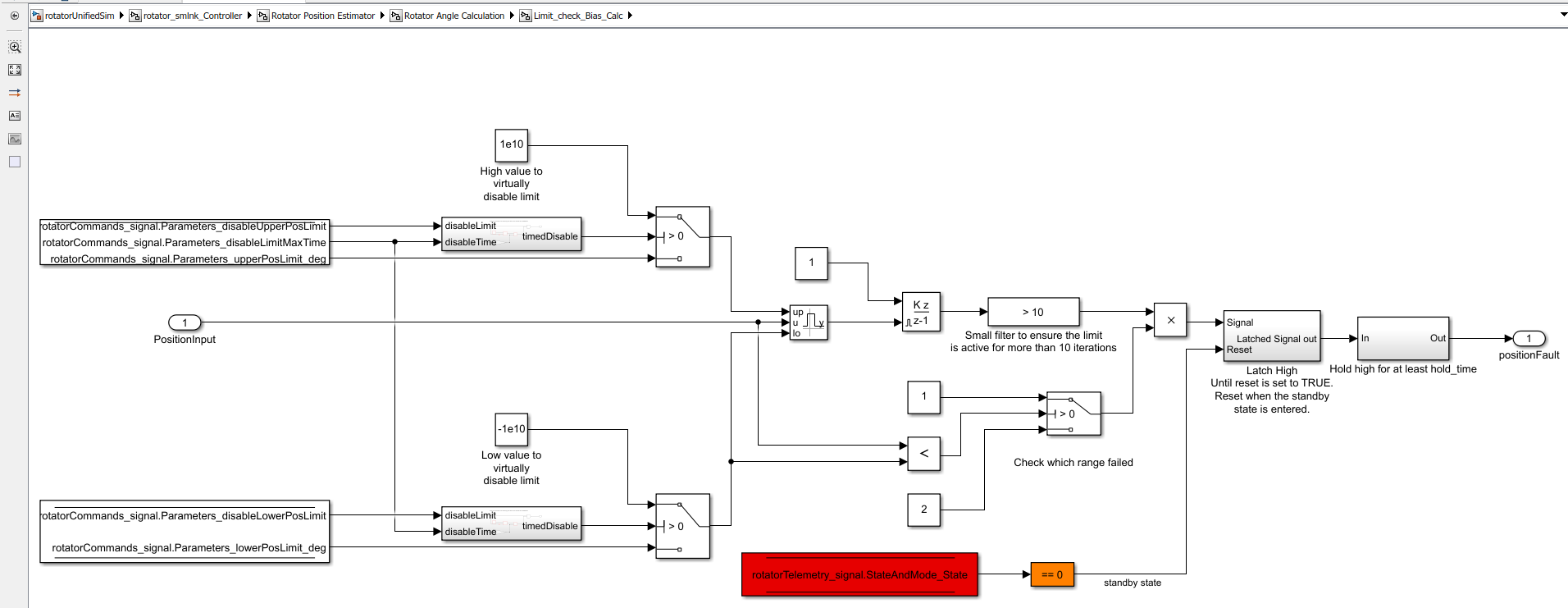
Updates in the software limit implementation:
- Remove the 1s delay for the software limit, changed to a 10 iteration filter to avoid false triggers due to possible position noise.
- Added parameters to disable the upper and lower limits (
disableUpperPosLimit,disableLowerPosLimitrespectively). This is done by using a value of 1e10 that is an absurd value that is never going to be met. - Added parameters to specify the maximum time to have the limits disabled,
disableLimitMaxTimein s. This time is controlled by a block that is used in both upper and lower limits, to avoid errors the same code is used, this is done by using a simulink library. - Added the latch high to keep the limit active until entering the standby state, same approach as the one used in the
following error. To make changes easier the same block is used in both places, by creating a simulink library and using
it for both faults.
-
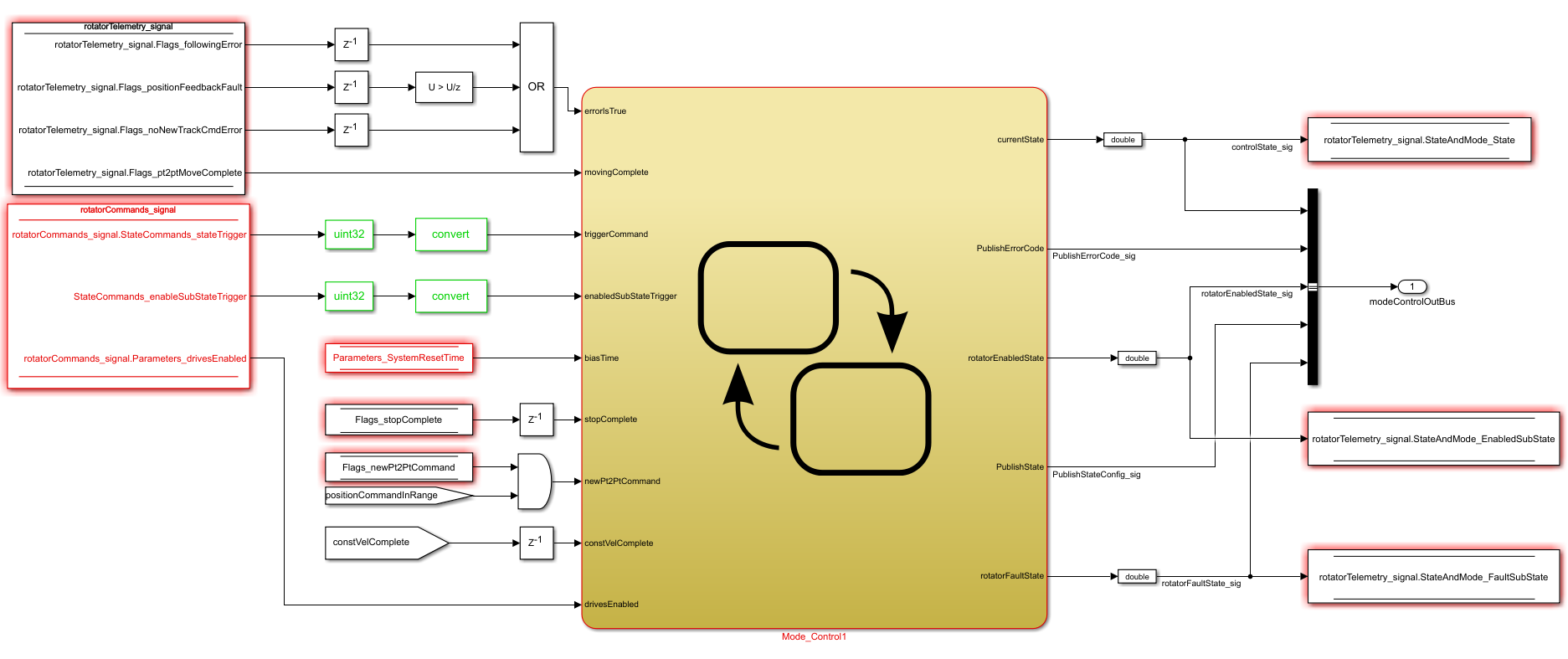
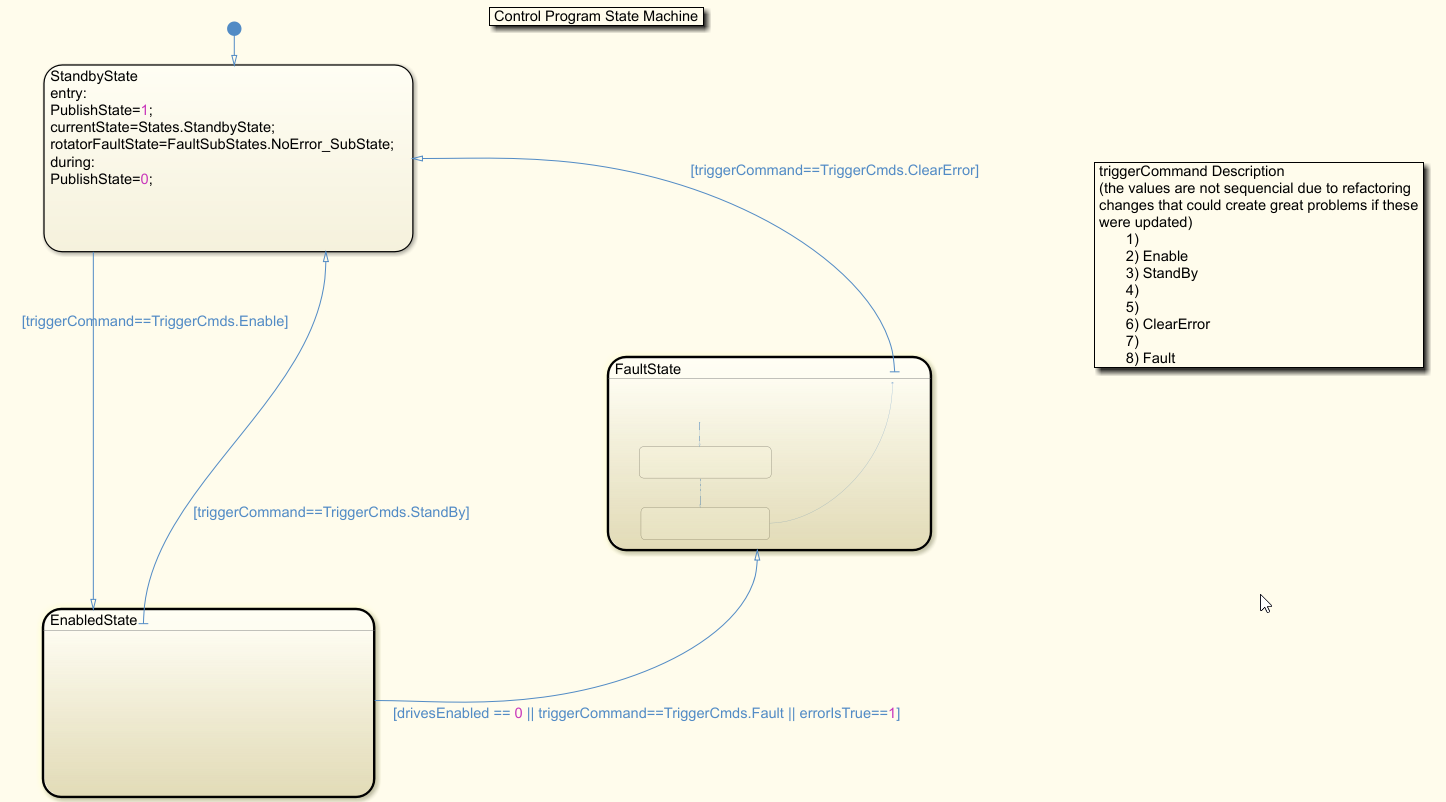
State machine update
- Remove initialization blocks
- Remove inputs from the state machine that are not used:
- errorIsTrue: an error occurred, transition to fault
- movingComplete: flag
- triggerCommand: TriggerCmds enum values 1:
- Invalid -> 0
- Enable -> 2
- StandBy -> 3
- ClearError -> 6
- Fault -> 8
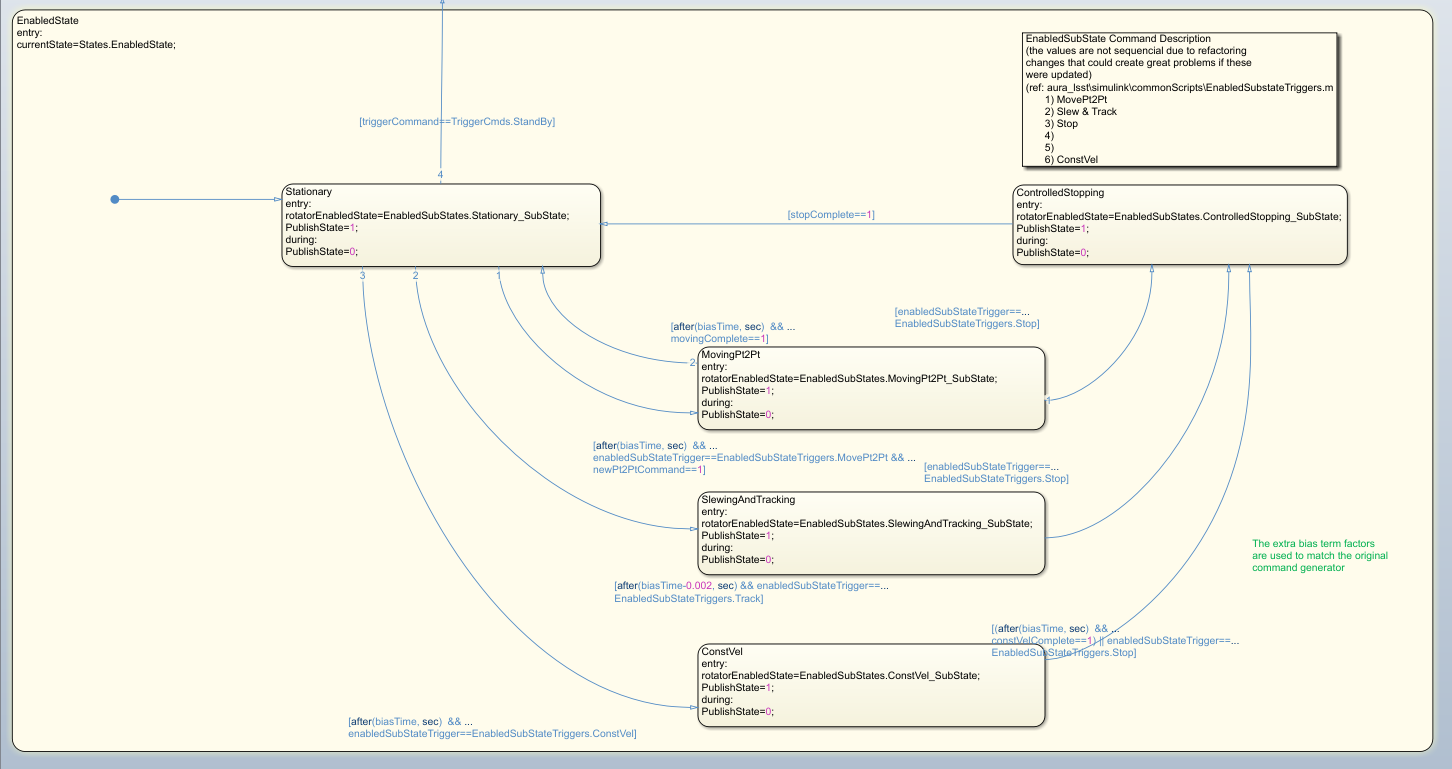
- enabledSubStateTrigger: EnabledSubStateTriggers enum values 1:
- EnabledInvalid -> 0
- MovePt2Pt -> 1
- Track -> 2
- Stop -> 3
- ConstVel -> 6
- biasTime: old code, not clear to me
- stopComplete: flag
- newPt2PtCommand: flag
- consVelComplete: flag
- Removed not used outputs of the state machine, leaving just:
- currentState: top level state of the state machine
- PublishErrorCode: trigger for publishing the error code
- PublishState: trigger for the matlab system to execute the actions
- rotatorEnabledState: the sub-states inside the enable state
- (added) rotatorFaultState: the sub-states inside the fault state
- Remove test states from the state machine and related telemetry variables.
- Remove CSC states from the state machine to make it just PLCopen state machine.
- Add the publication of the fault sub-states to telemetry.
- To keep the old naming from the Simulink model, there is a difference in the names from the proposed ones in the
document from Ismael, this relation is as follows:
- Idle -> Standby
- On -> Enabled
- On_Enabled -> Enabled_Stationary
@startuml state Standby state Fault state Enabled { state exitOn <<exitPoint>> } state Fault { state exitFault <<exitPoint>> } [*] --> Standby Standby --> Enabled : OnRequested Enabled --> Fault : Alarm exitOn --> Standby exitFault --> Standby @enduml
@startuml state Enabled { state exitOn <<exitPoint>> state Stationary state DiscreteMove state Stopping state JogMove state Tracking [*] --> Stationary Stationary --> DiscreteMove : Move DiscreteMove --> Stationary : MoveDone DiscreteMove --> Stopping : Stop Stationary --> JogMove : MoveVelocity Stationary -> exitOn : IdleRequested JogMove --> Stopping : Stop Stationary --> Tracking : EnableTracking Tracking --> Tracking : Track Tracking --> Stopping : Stop Stopping -up-> Stationary : StopDone } @enduml
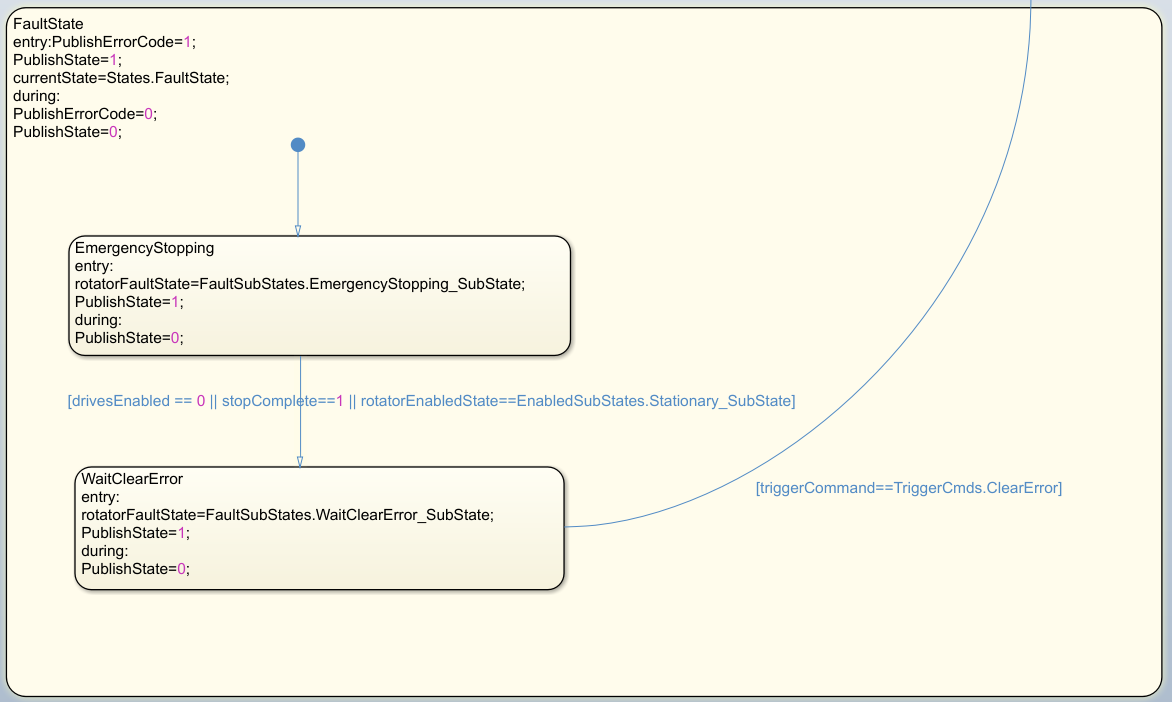
@startuml state Fault { state exitFault <<exitPoint>> [*] --> EmergencyStopping EmergencyStopping --> WaitClearError: StopDone WaitClearError-->exitFault: IdleRequested } @enduml
-
Remove the errorCheck command to go to fault, use the fault command instead.
-
Changes in the
commandParser.stepImplfunction to include the actions for the fault state. -
Changes in the
commandParser.stepImplfunction to remove theinRangeverification, this is set as a guard before the stateflow
-
In the model the two current limiter blocks are bypassed as with the software limit these are not required.
-
Changes in the XML files:
- Commands XML changes
- Removed fields inside commands:
- errorCheck
- Added fields inside parameters:
- EmergencyJerkLimit: jerk value for the emergency stop and the maximum value (hard limit).
- EmergencyAccelerationLimit: acceleration value for the emergency stop and the maximum value (hard limit).
- disableUpperPosLimit: for disabling the upper position software limit (1: disableLimit, 0: NOT disableLimit).
- disableLowerPosLimit: for disabling the lower position software limit (1: disableLimit, 0: NOT disableLimit).
- disableLimitMaxTime: the maximum time to have the limits disabled, in s.
- drivesEnabled: to inform the system if the drives are enabled or not (1: drivesEnabled, 0: drivesDisabled).
- maxVelocityLimit: velocity maximum value (hard limit).
- trackingSpeedMargin: the percentage of the VelocityLimit for tracking. 2
- trackingAccelerationMargin: the percentage of the AccelerationLimit for tracking. 2
- trackingJerkMargin: the percentage of the JerkLimit for tracking. 2
- Removed fields inside commands:
<item> <Name>EmergencyJerkLimit</Name> <DataType>double</DataType> <Default>4</Default> </item> <item> <Name>EmergencyAccelerationLimit</Name> <DataType>double</DataType> <Default>1</Default> </item> <item> <Name>disableUpperPosLimit</Name> <DataType>double</DataType> <Default>0</Default> </item> <item> <Name>disableLowerPosLimit</Name> <DataType>double</DataType> <Default>0</Default> </item> <item> <Name>disableLimitMaxTime</Name> <DataType>double</DataType> <Default>180</Default> </item> <item> <Name>drivesEnabled</Name> <DataType>double</DataType> <Default>0</Default> </item> <item> <Name>maxVelocityLimit</Name> <DataType>double</DataType> <Default>3.5</Default> </item> <item> <Name>trackingSpeedMargin</Name> <DataType>double</DataType> <Default>3</Default> </item> <item> <Name>trackingAccelerationMargin</Name> <DataType>double</DataType> <Default>25</Default> </item> <item> <Name>trackingJerkMargin</Name> <DataType>double</DataType> <Default>30</Default> </item>
- Telemetry XML changes:
- Remove telemetry states that no longer exist:
- OfflineSubState
- TestState
- Add new telemetry state for the fault sub-states:
- FaultSubStates, enum values:
- EmergencyStopping_SubState -> 0
- WaitClearError_SubState -> 1
- NoError_SubState -> 2
- FaultSubStates, enum values:
- Remove telemetry states that no longer exist:
- Commands XML changes
-
Reduce the warnings by adding terminators to the un connected outputs
-
Comment not used blocks
-
Modify the
trajectorySystemto allow changing the tracking limits from commands using parameters, the idea was to remove the XXHardLimits from thelsstParamsList.mbut we need to have default values for initializing the trajectory generator. For this reason, the XXhardLimit parameters below are renamed as follows:- velocityHardLimit -> defaultMaxSpeed: this value is to have a initial value for the
trajectorySystemmatlab system setup. - accelerationHardLimit -> defaultMaxAcceleration: this value is to have a initial value for the
trajectorySystemmatlab system setup. - jerkHardLimit -> defaultMaxJerk: this value is to have a initial value for the
trajectorySystemmatlab system setup. - trackingSpeedMargin -> defaultTrackingSpeedMargin: this value is to have a initial value for the
trajectorySystemmatlab system setup. - trackingAccelerationMargin -> defaultTrackingAccelerationMargin: this value is to have a initial value for the
trajectorySystemmatlab system setup. - trackingJerkMargin -> defaultTrackingJerkMargin: this value is to have a initial value for the
trajectorySystemmatlab system setup.
- velocityHardLimit -> defaultMaxSpeed: this value is to have a initial value for the
-
Remove positionUpperHardLimit and positionLowerHardLimit from the
lsstParamsList.mand the corresponding saturation from the simulink model, to allow configuration parameters RangeMinimum_deg and RangeMaximum_deg to be useful. Before both we checked, so moving the range to values bigger/smaller than the hard coded positionXXHardLimit values.






Footnotes
-
These values are not consecutive to reduce the impact of the changes and prevent errors ↩ ↩2
-
Is important to keep in mind that the trajectory generator uses two algorithms in parallel, so called slewing and tracking. One for compensating the slews (position steps) and the other for compensating the speed changes. So both algorithms are added when the system is in tracking state. This means that the actual speed, acceleration and jerk can be higher than the ones defined as VelocityLimit, AccelerationLimit, JerkLimit, as both algorithms are independent and the outcome is added, so for example, the total jerk would be JerkLimit x (100 + trackingJerkMargin) / 100 ↩ ↩2 ↩3