Disciplina optativa Robótica Aplicada ministrada pelo professor Vinícius no CEFET-MG campus de Leopoldina.
-
ROSCORE
- É o core do framework, gerencia e distribui cada porta para cada tópico e conecta os publish e subscribers nos seus respectivos tópicos.
-
O que é um nó?
- O nó é um processo que roda no computador e que é executado através de um arquivo executável no computador.
-
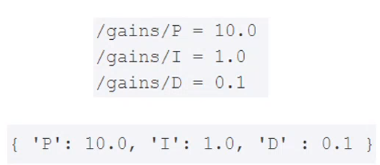
Servidor de Parâmetros
- É um dicionário de valores compartilhado e acessível a todos os nós
- São incializados junto com o Master
- Nós podem usar o servidor para ler ou definir parâmetros de configuração durante sua operação
- Existem dois tipos:
-
Parâmetros públicos: podem ser acessados diretamente sem especificar a qual nó pertencem: /public_param
-
Parâmetro privado: pertencem a um nó e são acessados especificando o nome desse nó primeiro: /node_name/private_param
-
-
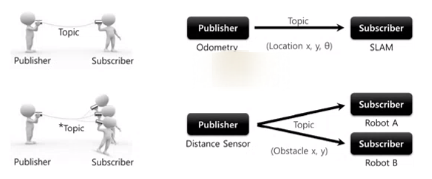
Comunicação por tópicos (Publish e Subscriber):
-
Quando um nó se inscreve em um tópico é porquê ele é um subscriber daquele tópico, então tudo que chegar naquele tópico ele vai receber de forma assincrona.
-
Quando um nó publica em um tópico é porquê ele é um publish daquele tópico, então ele publica dados no tópico de forma assincrona para que todos subscribers daquele tópico recebam esses dados.
-
-
Comunicação por Serviços (request e response)
-
Comunicação síncrona e bidirecional.
-
Mensagens com tipos pré-definidos
-
Cada nó que seja oferecer um serviço deve implementar seu próprio servidor de serviço.
-
Serviços podem ser chamados da CLI ou por outros nós (cliente do serviço)

-
-
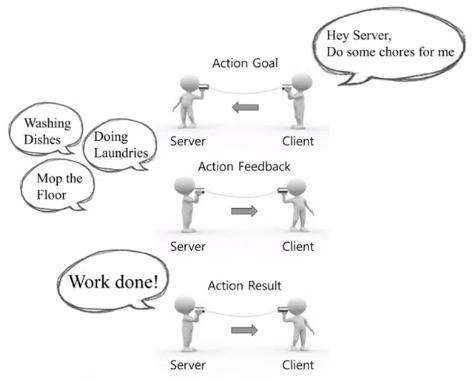
Comunicação do tipo Ação
-
Usadas para pedidos que demoram para ter retorno Ex: Robô, pegue o grampeador
-
Assíncrona e bidirecional, implementação próxima a serviços.
-
Servidor e cliente de ação (incomum ser usado pelo CLI)
-
-
Pacotes no ROS (packages)
- É uma unidade básica de software do ROS
- Pode conter nós, bibliotecas, arquivos de configuração, etc. Mas sempre relacionados a uma funcionalidade específica.
- Sempre que possível, devem ser construídos de forma genérica, possibilitando o reuso de código (comunidade).
- Podem ser instalados através de apt ou baixados pelo Github e compilados.
- Pacotes podem ser pesquisados em:
-
Launch File
- São arquivos XML para automatizar o serviço de encanamento:
- Inicializar grafos de nós, definir parâmetros, remapear tópicos.
- Mestre inicializado automaticamente.
- OBS: São muito importantes, sempre deve ser gasto tempo aqui
- São arquivos XML para automatizar o serviço de encanamento:
-
Bag
- É uma estrutura de datalog do ROS, ou seja, uma estrutura para salvar dados.
- Formato de arquivos utilizado para salvar mensagens geradas durante uma sessão do ROS
- Também permite o playback das informações em tempo controlado
- Muito importante para análise de eventos (robótica é caro)
- Pode gerar arquivos pesados e escrita intensiva no HD
-
Ferramentas
-
rosnode
-
Serve para listar os nós, testar, ver informações, interromper, entre outras funcionalidade:
**❯ rosnode --help** rosnode is a command-line tool for printing information about ROS Nodes. Commands: rosnode ping test connectivity to node rosnode list list active nodes rosnode info print information about node rosnode machine list nodes running on a particular machine or list machines rosnode kill kill a running node rosnode cleanup purge registration information of unreachable nodes Type rosnode <command> -h for more detailed usage, e.g. 'rosnode ping -h'
-
-
rosrun
-
Para não precisar caminhar até cada uma das pastas e executar o arquivo executável que roda um nó existe a ferramenta rosrun, que é uma ferramenta CLI que facilita a execução de um nó através do comando abaixo:
**rosrun --help** rosrun [--prefix cmd] [--debug] PACKAGE EXECUTABLE [ARGS] rosrun will locate PACKAGE and try to find an executable named EXECUTABLE in the PACKAGE tree. If it finds it, it will run it with ARGS.
-
Na hora de executar um nó de pacote com o rosrun você pode alterar o nome de um tópico com a sintaxe abaixo:
rosrun [--prefix cmd] [--debug] PACKAGE EXECUTABLE **/topic1:=/topic2**
-
Também é possível criar um parâmetro no nó na hora de rodar um nó com rosrun:
rosrun [--prefix cmd] [--debug] PACKAGE EXECUTABLE **_param_name:=7**
-
Também é possível setar parâmetros especiais, como o parâmetro que muda o próprio nome do nó:
rosrun [--prefix cmd] [--debug] PACKAGE EXECUTABLE __**name:=nome_do_no**
-
-
rostopic
-
Serve para interagir com os tópicos
**rostopic --help** rostopic is a command-line tool for printing information about ROS Topics. Commands: rostopic bw display bandwidth used by topic rostopic delay display delay of topic from timestamp in header rostopic echo print messages to screen rostopic find find topics by type rostopic hz display publishing rate of topic rostopic info print information about active topic rostopic list list active topics rostopic pub publish data to topic rostopic type print topic or field type Type rostopic <command> -h for more detailed usage, e.g. 'rostopic echo -h'
-
-
rosparam
-
Serve para ler e setar parâmetros.
**rosparam --help** rosparam is a command-line tool for getting, setting, and deleting parameters from the ROS Parameter Server. Commands: rosparam set set parameter rosparam get get parameter rosparam load load parameters from file rosparam dump dump parameters to file rosparam delete delete parameter rosparam list list parameter names
-
-
rosservice
-
Serve para listar serviços disponíveis, pegar informações ou chamar o serviço:
**rosservice --help** Commands: rosservice args print service arguments rosservice call call the service with the provided args rosservice find find services by service type rosservice info print information about service rosservice list list active services rosservice type print service type rosservice uri print service ROSRPC uri Type rosservice <command> -h for more detailed usage, e.g. 'rosservice call -h'
-
-
roslaunch
-
Para executar um Launch File deve-se utilizar o roslaunch:
- Segue o mesmo formato que o rosrun
- Permite argumentos para customização
**roslaunch --help** Usage: roslaunch [options] [package] <filename> [arg_name:=value...] roslaunch [options] <filename> [<filename>...] [arg_name:=value...] If <filename> is a single dash ('-'), launch XML is read from standard input.
-
-
rosbag
-
Ferramenta para interagir com a bag
**rosbag --help** Usage: rosbag <subcommand> [options] [args] A bag is a file format in ROS for storing ROS message data. The rosbag command can record, replay and manipulate bags. Available subcommands: check Determine whether a bag is playable in the current system, or if it can be migrated. compress Compress one or more bag files. decompress Decompress one or more bag files. decrypt Decrypt one or more bag files. encrypt Encrypt one or more bag files. filter Filter the contents of the bag. fix Repair the messages in a bag file so that it can be played in the current system. help info Summarize the contents of one or more bag files. play Play back the contents of one or more bag files in a time-synchronized fashion. record Record a bag file with the contents of specified topics. reindex Reindexes one or more bag files. For additional information, see http://wiki.ros.org/rosbag
-
-
roscd
- Serve para navegar entre diretórios de pacotes ROS.
roscd **package_name**
-
rosed
- Serve para editar diretamente um arquivo de um pacote ROS.
rosed **[package] [file]**
-
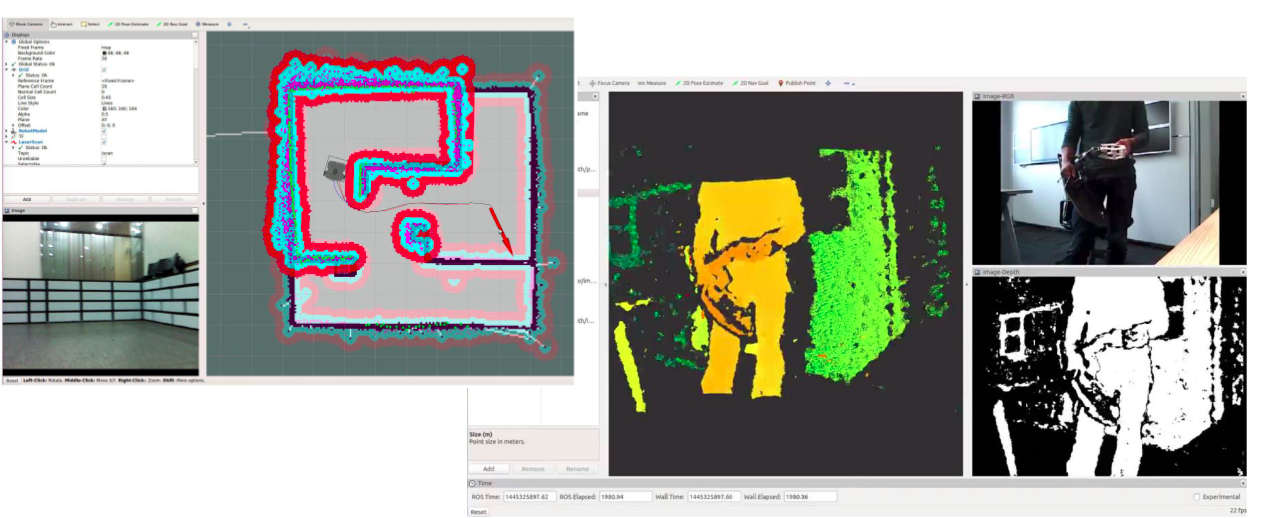
RViz
-
É um visualizador dos seus sensores do seu robô, é como se você tivesse vendo exatamente o que o robô vê.
-
-
-
Estrutura de arquivos do ROS
- A estrutura de arquivos do ROS é dividida entre diretório de instalação e "espaços de trabalho".
- Diretório de instalação:
- /opt/ros/noetic/
- Instalação de programas como roscore, rqt, Rviz
- Normalmente não deve ser modificada pelo usuário
- Espaço de trabalho:
-
Qualquer diretório que o usuário tenha permissão, mas normalmente ~/catkin_ws/
mkdir -p ~/catkin_ws/src -
Compilação e instalação de pacotes a partir de código fonte, desenvolvido por conta própria ou por terceiros.
-
- Diretório de instalação:
- A estrutura de arquivos do ROS é dividida entre diretório de instalação e "espaços de trabalho".
-
Pacotes ROS
- Sistema de construção do ROS (Build System)
- Para construir pacotes a partir de código fonte, o ROS usa um sistema chamado catkin, baseado no CMake.
- Cada pacote deve ter um diretório próprio e no mínimo 2 arquivos:
- CMakeList.txt: Define as diretrizes para compilação e instalação do pacote com CMake
- Em python é chamada para setup.py
- package.xml: Arquivo XML definindo metadados (autor, website, etc...) e dependências do pacote.
- CMakeList.txt: Define as diretrizes para compilação e instalação do pacote com CMake
- Construindo um pacote do ROS
-
Criando:
cd ~/catkin_ws/src && catkin_create_pkg nome_do_pacote depend1 depend2 Ex: catkin_create_pkg meu_primeiro_pacote rospy std_msgs
- Cria uma pasta "meu_primeiro_pacote" contendo os arquviso package.xml e CMakeList.txt e as dependências em rospy e std_msgs já definidas
-
Construindo:
cd ~/catkin_ws && catkin_make source ~/catkin_ws/devel/setup.bash
- Todos os pacotes em ~/catkin_ws/src são construídos simultaneamente, e suas dependências instaladas (se corretamente configurado).
-
- Estrutura Típica de um pacote:
- /include: Header files
- /launch: Launch Files Used with roslaunch
- /node: Script for rospy
- /msg: Message Files
- /src: Source Code Files
- /srv: Service Files
- CMakeList.txt: Build Configuration File
- package.xml: Package Configuration File
- /config: Arquivos de configuração (YAML)
- Sistema de construção do ROS (Build System)
-
rospy (Cliente ROS para Python)
- É uma biblioteca que permite interagir com o framework do ROS utilizando Python.
- http://wiki.ros.org/rospy





-
Cursos de ROS:
-
Livros:
-
Artigo:
-
Turoriais passo-a-passo:
- http://wiki.ros.org/ROS/Tutorials
- Configurando ambiente
- Entendendo nós
- Entendendo tópicos
- Entendendo serviços e parâmetros
- Usando rqt console e ros launch
- Criando um ROS package
- Construindo um ROS package
- Escrevendo um simples Publish e Subscriber em Python
- Examinando o simples Publish e Subscriber em Python