Download the bot.sdf which is the SDF (Simulation Description Format) file of IRoc Rover.
Run -
sudo apt-get update
sudo apt-get install lsb-release wget gnupg
sudo wget https://packages.osrfoundation.org/gazebo.gpg -O /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/pkgs-osrf-archive-keyring.gpg] http://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/gazebo-stable.list > /dev/null
sudo apt-get update
sudo apt-get install ignition-fortress
sudo apt-get install ros-humble-rviz2
sudo apt-get install ros-humble-gazebo-plugins
sudo apt-get install ros-humble-gazebo-ros-pkgs
sudo apt-get install ros-humble-gazebo-msgs
sudo apt-get install ros-humble-tf2-ros ros-humble-tf2-tools
sudo apt-get install gazebo-ros-control
sudo apt-get install ros-humble-gazebo-ros-control
sudo apt-get install ros-humble-gazebo-ros-pkgs
sudo apt-get install ros-humble-ros-ign-bridgeFor Gazebo, run -
ign gazebo bot.sdf

For Rviz2, in a seprate terminal run -
rviz2To get list of ign topics (gazebo topics), run -
ign topic -l
While for ros2 topics, run -
ros2 topic list
To access any topic, create a bridge from gz to ros2 by running command in the format-
ros2 run ros_gz_bridge parameter_bridge /TOPIC@ROS_MSG@IGN_MSGNOTE : For msg types refer here - Bridge communication between ROS and Gazebo
-
For depth image (by depth camera) along with camera info (For Rviz2) run the following commands in seprate terminals..
ros2 run ros_gz_bridge parameter_bridge /world/default/model/bot/link/depth/sensor/depth_camera/depth_image@sensor_msgs/msg/Image@gz.msgs.Image ros2 run ros_gz_bridge parameter_bridge /world/default/model/bot/link/depth/sensor/depth_camera/camera_info@sensor_msgs/msg/CameraInfo@gz.msgs.CameraInfo -
Visualize depth image using rqt pkg -
ros2 run rqt_image_view rqt_image_view /world/default/model/bot/link/depth/sensor/depth_camera/depth_image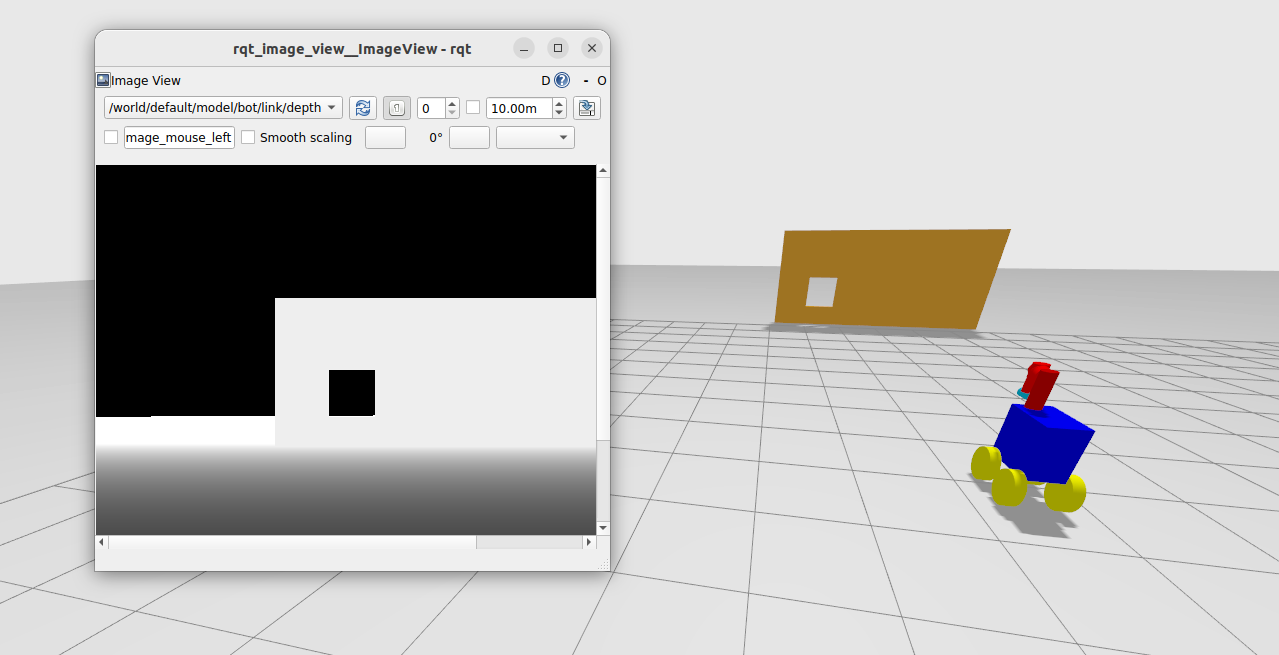
-
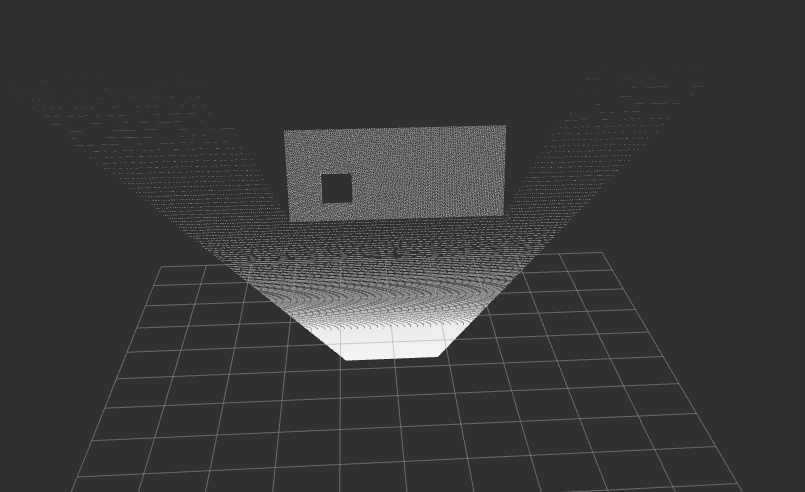
Bridge for point cloud (by depth camera) -
ros2 run ros_gz_bridge parameter_bridge /world/default/model/bot/link/depth/sensor/depth_camera/depth_image/points@sensor_msgs/msg/PointCloud2@gz.msgs.PointCloudPackedChange fixed frame in rviz2 to bot/depth/depth_camera to read pointcloud or depth image data.
-
To get pathlines of bot, establish odometry bridge via -
ros2 run ros_gz_bridge parameter_bridge /model/bot/odometry@nav_msgs/msg/Odometry@gz.msgs.OdometryChange fixed frame in rviz2 to bot/odom for odometry measurements.


We can contol the bot through arrow keys (use of keypublisher plugin) or can publish to the topic /cmd_vel by running command -
ign topic -t "/cmd_vel" -m ignition.msgs.Twist -p "linear: {x: 0.2}, angular: {z: 0.5}"

To check for keyboard commands, run -
ign topic -e -t /keyboard/keypress
To apply transformation to send data from one frame to another one, run command in the format-
ros2 run tf2_ros static_transform_publisher --frame-id bot/depth/depth_camera --child-frame-id world