


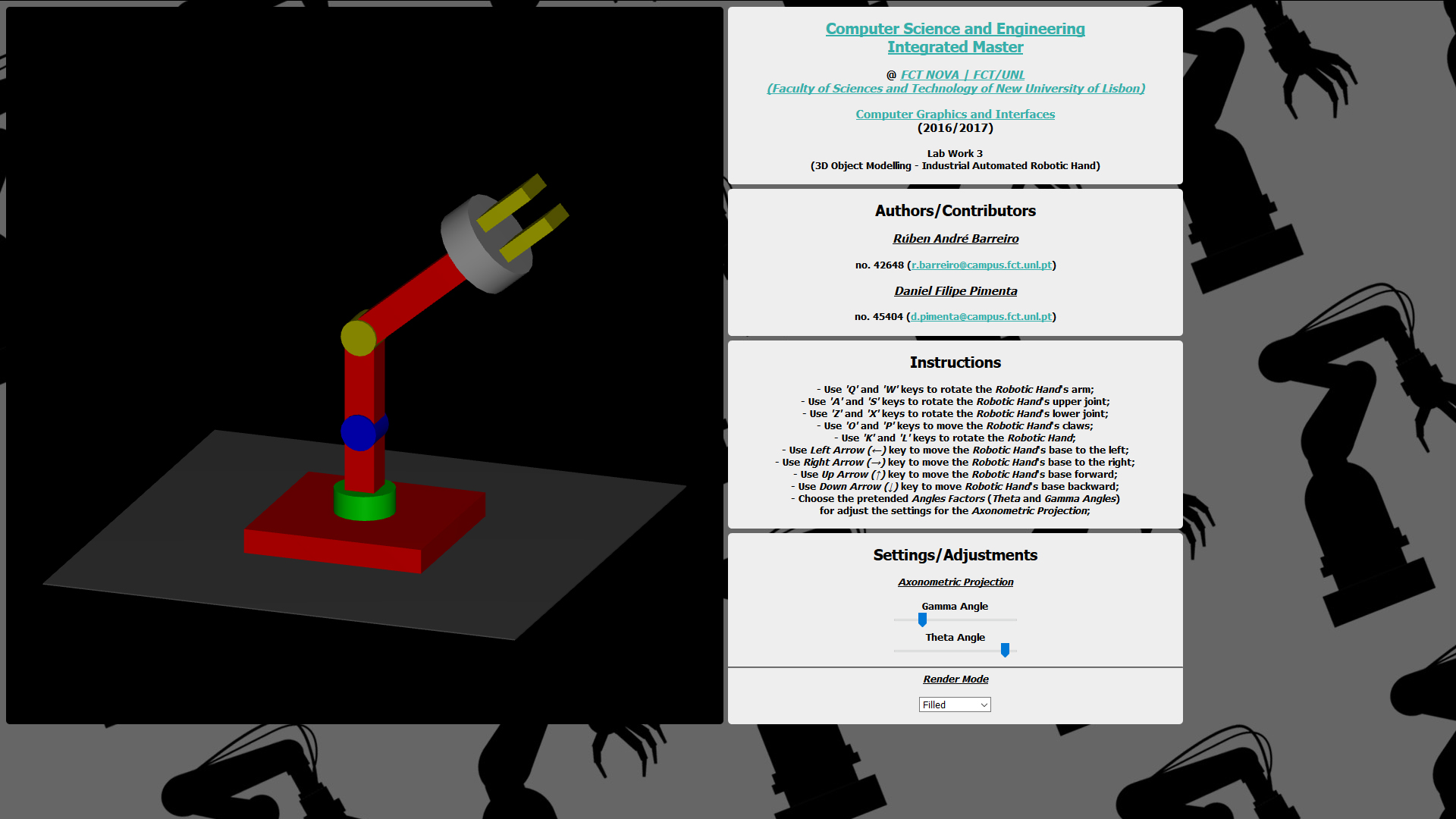
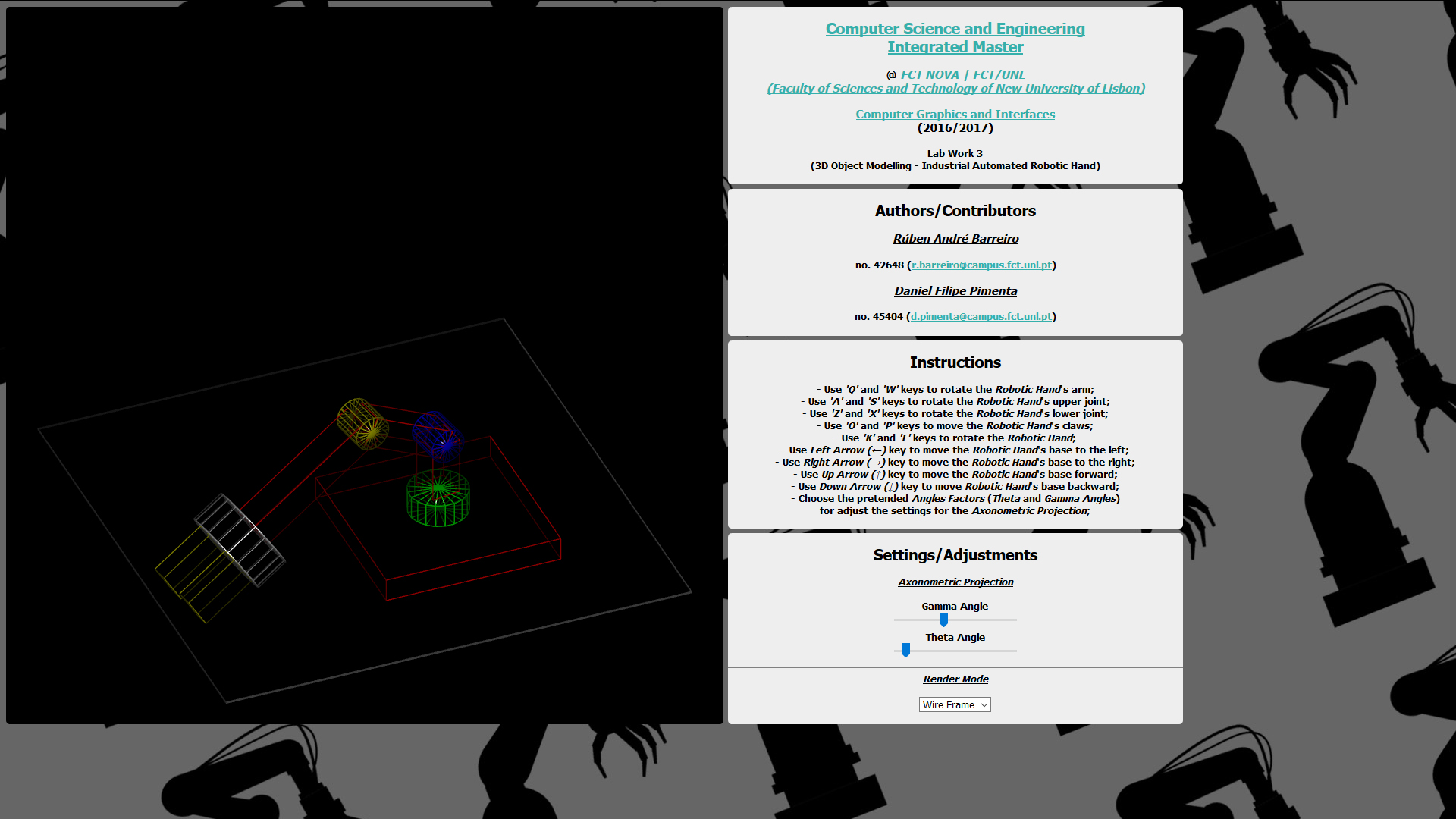
A 3rd year's project of the BSc. degree of Computer Sciences and Engineering made in FCT NOVA (Faculty of Sciences and Technology of New University of Lisbon), in the subject of Computer Graphics and Interfaces. This project was built using HTML (HyperText Markup Language), CSS (Cascade Style Sheets), JavaScript and WebGL (Web Graphics Library). The application allows to move and manipulate an Industrial Automated Robotic Hand, all using 3D Modelling and 3D Objects. The Robotic Hand can be moved along the floor, do grab movements and rotate some of its own components. The movements and actions of the Robotic Hand are always performed using the keyboard and you can see all the action of multiple angles, using an Axonometric Projection!
You can view an online demo, clicking here!
To install and run this application, you will only need:
A Web browser, like:
The Git feature and/or a third-party Git Client based GUI, like:
To install this application, you will only need to download or clone this repository and run the application locally:
You can do it downloading the .zip file in download section of this repository.
Or instead, by cloning this repository by a Git Client based GUI, using HTTPS or SSH, by one of the following link:
https://github.com/rubenandrebarreiro/3d-object-modelling-industrial-automated-robotic-hand.git
- SSH:
git@github.com:rubenandrebarreiro/3d-object-modelling-industrial-automated-robotic-hand.git
Or even, by running one of the following commands in a Git Bash Console:
git clone https://github.com/rubenandrebarreiro/3d-object-modelling-industrial-automated-robotic-hand.git
- SSH:
git clone git@github.com:rubenandrebarreiro/3d-object-modelling-industrial-automated-robotic-hand.git
You can run the application, by open the following file presented in the root folder of this repository:
3d-object-modelling-industrial-automated-robotic-hand.html
Instructions (also available in the canvas of the application):
-
Use 'Q' and 'W' keys to rotate the Robotic Hand's arm
-
Use 'A' and 'S' keys to rotate the Robotic Hand's upper joint
-
Use 'Z' and 'X' keys to rotate the Robotic Hand's lower joint
-
Use 'O' and 'P' keys to move the Robotic Hand's claws
-
Use 'K' and 'L' keys to rotate the Robotic Hand's hand
-
Use Left Arrow (←) key to move the Robotic Hand's base to the left
-
Use Right Arrow (→) key to move the Robotic Hand's base to the right
-
Use Up Arrow (↑) key to move the Robotic Hand's base forward
-
Use Down Arrow (↓) key to move Robotic Hand's base backward
-
Choose the pretended Angles Factors (Theta and Gamma Angles) for adjust the settings for the Axonometric Projection
-
It's mandatory to have the folder called common in the local repository, because it's where are the necessary WebGL utilities, geometric/solid figures and other libraries
-
It's also mandatory to have the respective application's JavaScript file in the root folder of this repository
3d-object-modelling-industrial-automated-robotic-hand.js
- HTML (HyperText Markup Language)
- CSS (Cascade Style Sheets)
- JavaScript
- WebGL (Web Graphics Library)
- Atom
- Brackets
Daniel Filipe Pimenta
- ruben.barreiro.92@gmail.com
- r.barreiro@campus.fct.unl.pt
- up201808917@fe.up.pt
- up201808917@g.uporto.pt
- https://github.com/rubenandrebarreiro/
- https://gitlab.com/rubenandrebarreiro/
- https://bitbucket.org/rubenandrebarreiro/
- 19 of 20