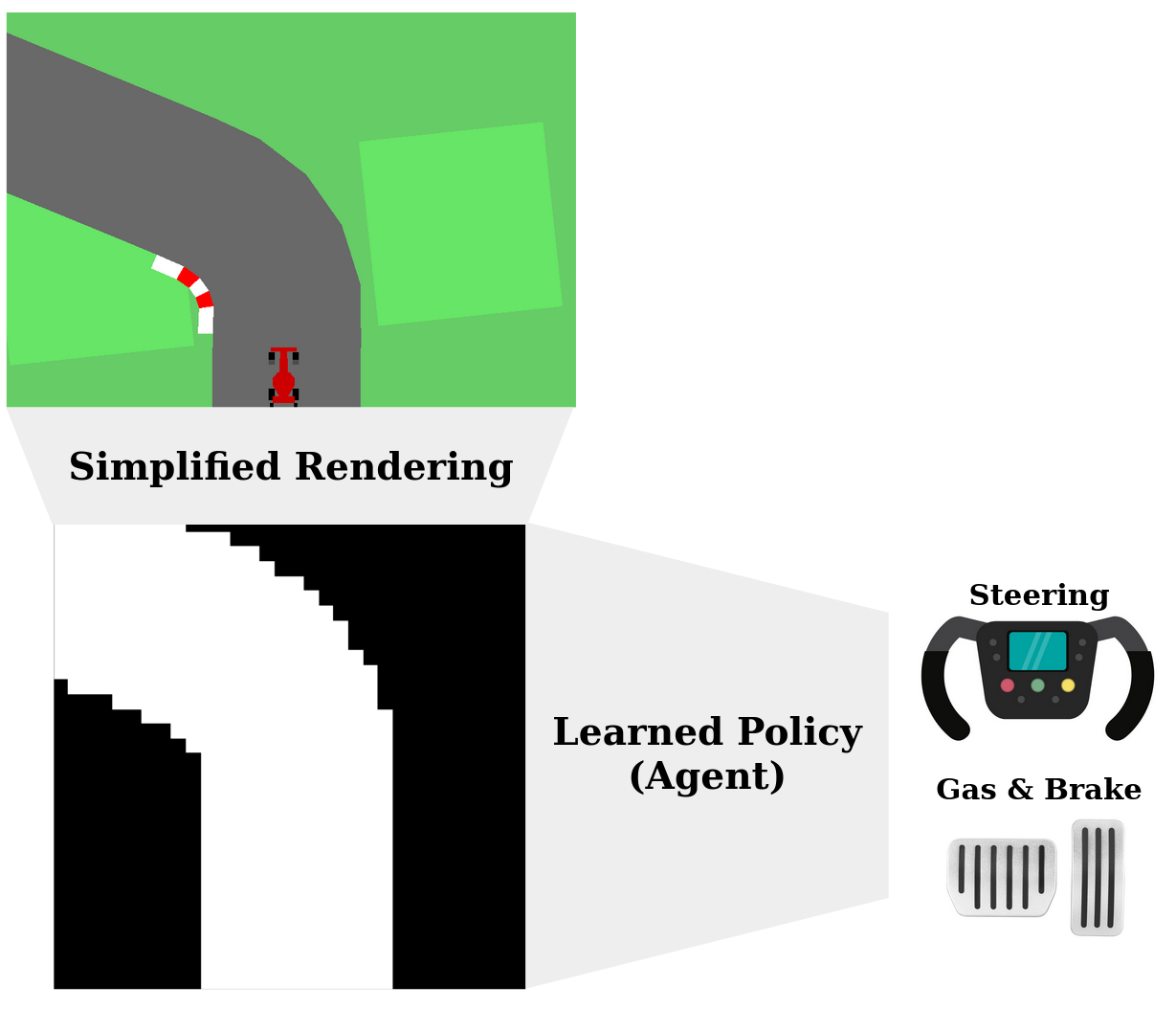
Black-box, gradient-free optimization of car-racing policies.
Our best performing agent, the tuned genetic program (red) races against the untuned genetic program (blue).

| Method Name | Max Reward | Mean Reward | Mean # Function evaluations to reach 900 |
|---|---|---|---|
| Nelder Mead | 713.2 | Not Applicable | Not Applicable |
| NN + Generation-based Evolution Strategy (3 repetitions) | 925.7 | 923.3 | 9.8k |
| NN + Iterative Evolution Strategy (4 repetitions) | 915.5 | 906.3 | 50.3k |
| Genetic Program (4 repetitions) | 928.2 | 917.2 | 5.8k |
| Tuned Genetic Programming | 930.6 | Not Applicable | Not Applicable |
Our best results were achieved by fine tuning constants of the best genetic program using evolution strategies.
Graphics, physics engine and reward calculation adapted from OpenAI gym.
To improve performance, we rewrote the graphics pipeline yielding ~40x sequential speedup. Our modifications allow the evaluations to run headless and be parallelized. We also added a feature where multiple agents are evaluated simultaneously, allowing for a "race" to be visualized. All experiments were performed on the ETH Euler Supercomputer.