One year ago, in the middle of Covid19, with my brother we did this robot alternative, it is a remix of a popular SG90 12DOF robot in Thingiverse, My brother did again some 3d print parts and I did the migration from two Arduino micro controllers to a only ESP32 micro controller using FreeRTOS tasks. Also the robot using a Bluetooth connection for improve usability and power consumption, but is possible controlling it with WiFI connection.
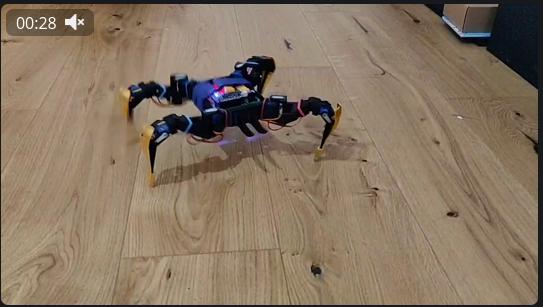
The robot is useful for understand many things, and is funny making it, but the speed and performance is a little bit buggy, we recommended using MG90S servos instead SG90 plastic servo, or maybe using better servos, also the hexapod config will be better, but again, for learning it model is fine.

First of all, install PlatformIO with your favourite IDE (i.e. VSCode). Follow this instructions. Also, you may need to install git in your system.
git clone https://github.com/hpsaturn/quadpod.gitConnect the ESP32 via USB. In Windows 10, drivers are installed automatically. I guess with other OS will be automatically installed too.
Open cloned folder with your PlatformIO IDE and build & upload it. For details please see the documentation, but the process flow is more easy than Arduino IDE flow, but you can also import it to the Arduino IDE if you want.

Or after clone also you can build and upload the current firmware from CLI:
cd quadpod && pio pio run --target upload
For now, you can use this app: Serial Bluetooth Terminal and donwload the file serial_bluetooth_terminal.cfg.txt that is under bt folder of this project, then send it to your phone and import it with this application for get all commands and buttons for controlling the robot.
Special thanks to Santiago Vanegas for 3D models and many improvements.
If you want invite me a coffee in:
https://hpsaturn.com/about/
https://paypal.me/hpsaturn
CanAir.IO Citizen network for monitoring air quality https://canair.io
