
Hall Sensored Six-Step Commutation for BLDC Motor : dsPIC33CK Low Voltage Motor Control (LVMC) Board
This document describes the setup requirements for driving the Brushless DC (BLDC) Motor using six-step commutation with Hall Sensor feedback on the hardware platform dsPIC33CK Low Voltage Motor Control (LVMC) Board.
For details about six-step commutation of BLDC motor using Hall Sensor feedback, refer to Microchip application note AN957 “Sensored BLDC Motor Control”.
To clone or download this application firmware on GitHub,
- Navigate to the main page of this repository and
- On the tab <> Code, above the list of files in the right-hand corner, click Code, then from the menu, click Download ZIP or copy the repository URL to clone.
Note:
In this document, hereinafter this firmware package is referred as firmware.
- MPLAB® X IDE v6.10
- DFP: dsPIC33CK-MP_DFP v1.11.346
- MPLAB® XC16 Compiler v2.10
- MPLAB® X IDE Plugin: X2C-Scope v1.3.3
Note:
The software used for testing the firmware prior to release is listed above. It is recommended to use the version listed above or later versions for building the firmware.
- dsPIC33CK Low Voltage Motor Control Board, Part-No. DM330031
- 24V Power Supply, Part-No. AC002013
- 24V 3-Phase Brushless DC Motor, Part-No. AC300020
Note:
All items listed under the section Hardware Tools Required for the Demonstration are available at microchip DIRECT
This section describes hardware setup required for the demonstration.
-
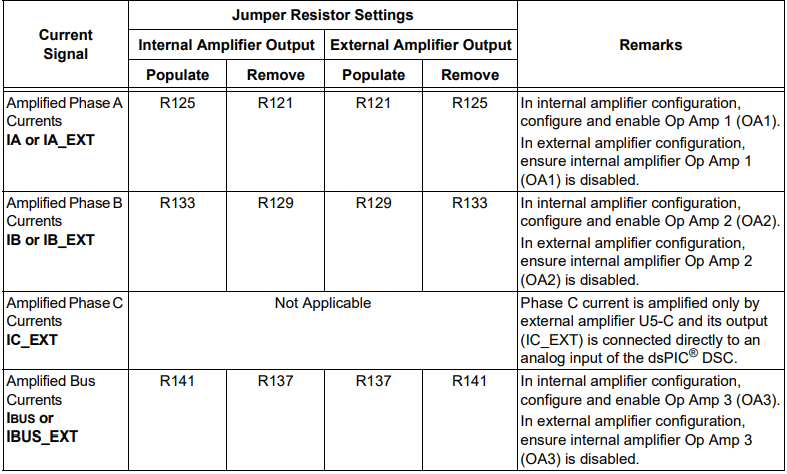
Motor currents are amplified on the Motor Control Development Board; it can also be amplified by the amplifiers internal to the device dsPIC33CK256MP508. The firmware and development board are configured to sample and convert internal amplifier outputs ('internal op-amp configuration'). The Table below summarizes the resistors to be populated and removed to convert the development board from ‘internal op-amp configuration’ to ‘external op-amp configuration’ or vice versa.
-
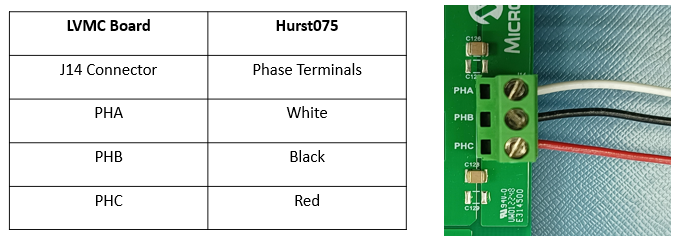
Connect the 3-phase wires from the motor to the connector J14, provided on the Motor Control Development Board in the specified order as shown below.
-
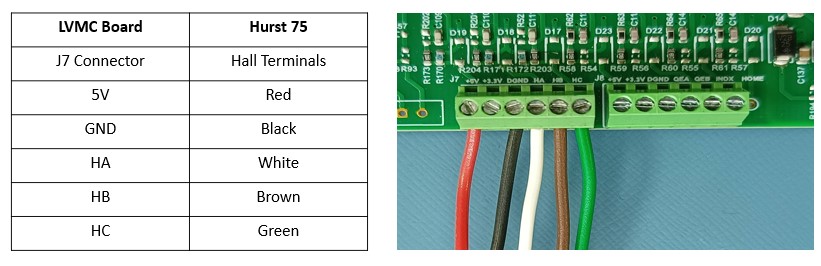
Connect the Hall Sensor wires from the motor to the connector J7, provided on the Motor Control Development Board in the specified order as shown below.
-
Plug the 24V power supply to connector J1 on the Motor Control Development Board. Alternatively, the development board can also be powered through connector J2.

-
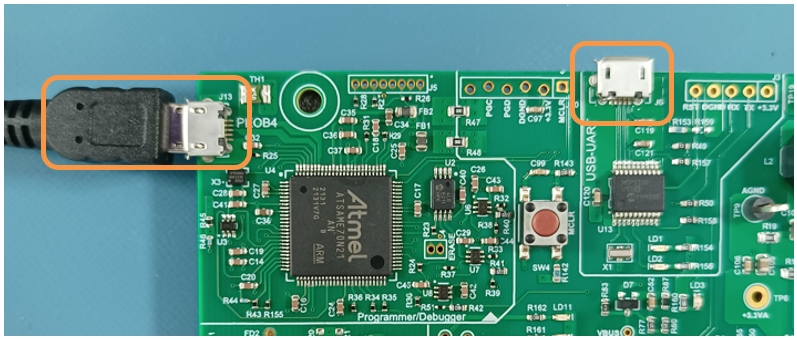
The board has an onboard programmer PICkit™ On Board (PKoBv4) , which can be used for programming or debugging the microcontroller or dsPIC DSC on the development board. To use the onboard programmer, connect a micro-USB cable between the Host PC and connector J13 on the Motor Control Development Board.
-
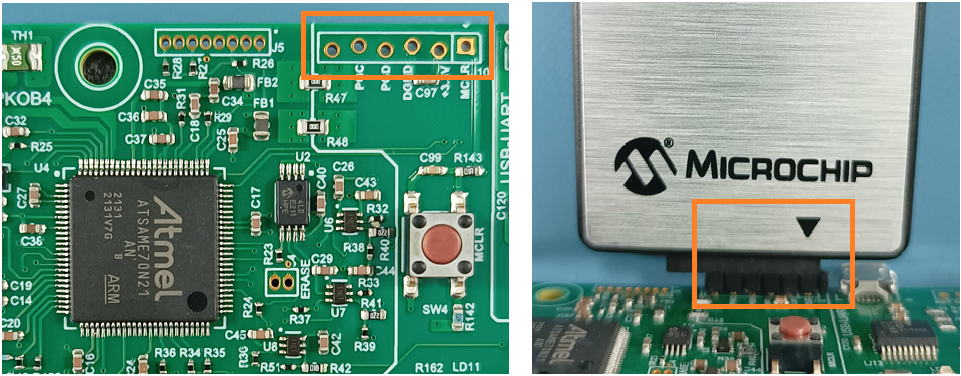
Alternatively, connect the Microchip programmer/debugger MPLAB® PICkit™ 4 In-Circuit Debugger between the Host PC used for programming the device and the ICSP header J10 on the Motor Control Development Board (as shown). Ensure that PICkit 4 is oriented correctly before proceeding.






Install MPLAB X IDE and MPLAB XC16 Compiler versions that support the device dsPIC33CK256MP508 and PKoBv4. The MPLAB X IDE, MPLAB XC16 Compiler, and X2C-Scope plug-in used for testing the firmware are mentioned in the Motor Control Application Firmware Required for the Demonstration section.
To get help on
If MPLAB IDE v8 or earlier is already installed on your computer, then run the MPLAB driver switcher (Installed when MPLAB®X IDE is installed) to switch from MPLAB IDE v8 drivers to MPLAB X IDE drivers. If you have Windows 8 or 10, you must run the MPLAB driver switcher in Administrator Mode. To run the Device Driver Switcher GUI application as administrator, right-click on the executable (or desktop icon) and select Run as Administrator. For more details, refer to the MPLAB X IDE help topic “Before You Begin: Install the USB Device Drivers (For Hardware Tools): USB Driver Installation for Windows Operating Systems.”
X2C-Scope is an MPLAB X IDE plugin that allows developers to interact with an application while it runs. X2C-Scope enables you to read, write, and plot global variables (for motor control) in real-time. It communicates with the target using the UART. To use X2C-Scope, the plugin must be installed. To set up and use X2C-Scope, refer to the instructions provided on the web page.
The firmware version needed for the demonstration is mentioned in the section Motor Control Application Firmware Required for the Demonstration section. This firmware is implemented to work on Microchip’s 16-bit Digital signal controller (dsPIC® DSC) dsPIC33CK256MP508. For more information, see the dsPIC33CK256MP508 Family datasheet (DS70005349).
The Motor Control Demo application uses push buttons to start or stop the motor and for direction reversal. Also, a potentiometer is used to vary the speed of the motor. This Motor Control Demo Application configures and uses peripherals like PWM, ADC, UART, etc. For more details, refer to Microchip Application note AN957, “Sensored BLDC Motor Control Using dsPIC30F2010” available on the Microchip website.
Note:
The project may not build correctly in Windows OS if the Maximum path length of any source file in the project is more than 260 characters. In case the absolute path exceeds or nears the maximum length, do any (or both) of the following:
- Shorten the directory name containing the firmware used in this demonstration. If you renamed the directory, consider the new name while reading the instructions provided in the upcoming sections of the document.
- Place firmware in a location such that the total path length of each file included in the projects does not exceed the Maximum Path length specified.
Refer to MPLAB X IDE help topic “Path, File, and Folder Name Restrictions” for details.
Follow the below instructions, step by step, to set up and run the motor control demo application:
-
Start MPLAB X IDE and open the project bldc.X (File > Open Project) with device selection dsPIC33CK256MP508.
-
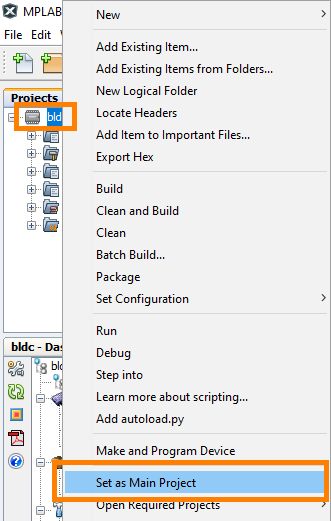
Set the project bldc.X as the main project by right-clicking on the project name and selecting Set as Main Project as shown. The project bldc.X will then appear in bold.
-
Open
bldc_main.h(bldc.X > Header Files) in the project bldc.X.-
Ensure that the macro
SPEED_PI_CLOSEDLOOPis defined in the header filebldc_main.hNote:
There are three different operating modes in this application - openloop duty control, closed loop speed control and closed loop torque control. These modes can be selected in the application code using the macrosOPENLOOP,SPEED_PI_CLOSEDLOOPandCURRENT_PI_CLOSEDLOOP. Ensure that only one of the operating modes is defined at a time.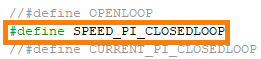
-
When internal amplifiers are used for current amplification (referred to as internal op-amp configuration), define the macro
INTERNAL_OPAMP_CONFIGinport_config.h.
-
Otherwise, if external amplifiers are used for current amplification (referred to as external op-amp configuration), undefine the macro
INTERNAL_OPAMP_CONFIGin the header fileport_config.h.
-
-
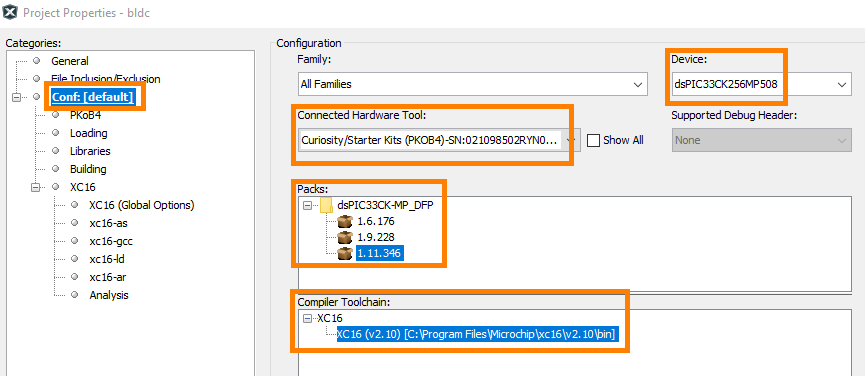
Right-click on the project bldc.X and select Properties to open its Project Properties Dialog. Click the Conf:[default] category to reveal the general project configuration information. The development tools used for testing the firmware are listed in section 2.2 Software Tools Used for Testing the firmware.
In the Conf:[default] category window:
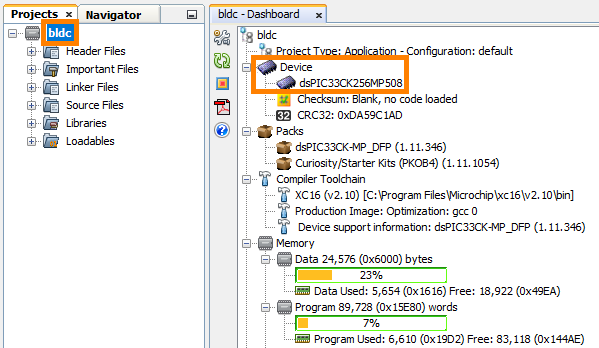
- Ensure the selected Device is dsPIC33CK256MP508.
- Select the Connected Hardware Tool to be used for programming and debugging.
- Select the specific Device Family Pack (DFP) from the available list of Packs. In this case, dsPIC33CK-MP_DFP 1.11.346 is selected.
- Select the specific Compiler Toolchain from the available list of XC16 compilers. In this case, XC16(v2.10) is selected.
- After selecting Hardware Tool and Compiler Toolchain, Device Pack, click the button Apply
Please ensure that the selected MPLAB® XC16 Compiler and Device Pack support the device configured in the firmware
-
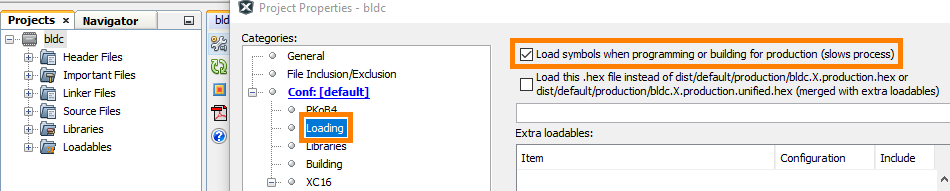
Ensure that the checkbox Load symbols when programming or building for production (slows process) is checked under the Loading category of the Project Properties window.
-
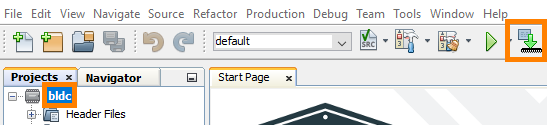
To build the project (in this case, bldc.X) and program the device dsPIC33CK256MP508, click Make and Program Device Main project on the toolbar
-
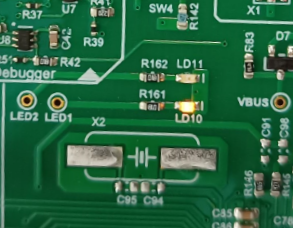
If the device is successfully programmed, LD10 (LED1) will be turned ON, indicating that the dsPIC® DSC is enabled.
-
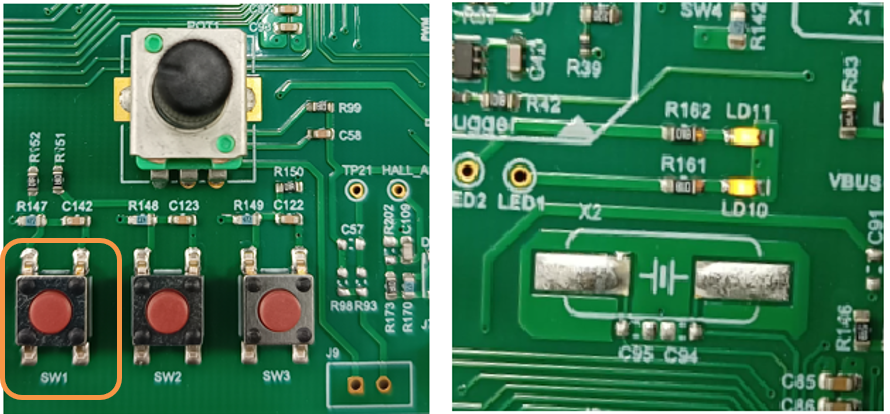
Run or stop the motor by pressing the push button SW1. The motor should start spinning smoothly in one direction in the nominal speed range. Ensure that the motor is spinning smoothly without any vibration. The LED LD11(LED2) is turned ON to show the button is pressed to start the motor.
-
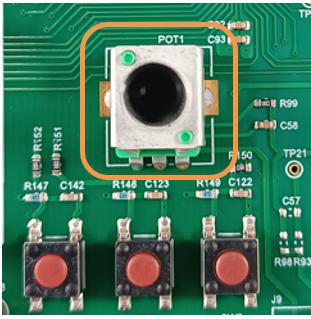
The motor speed can be varied using the potentiometer (POT1).
-
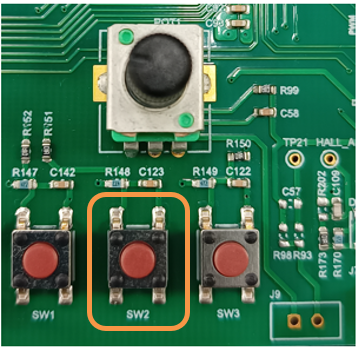
Press the push button SW2 to reverse the direction.
-
Press the push button SW1 to stop the motor.












Note:
The macrosMAX_MOTORSPEED,MAX_MOTORCURRENT,POLEPAIRS,SECTORandMAX_BOARDCURRENTare specified in the header filebldc_main.hincluded in the project bldc.X. The macrosMAX_MOTORSPEEDandMAX_MOTORCURRENTare defined as per the Motor manufacturer’s specifications. Exceeding manufacture specifications may damage the motor or the board or both.
X2C-Scope is a third-party plug-in in MPLAB X, which helps in real-time diagnostics. The application firmware comes with the initialization needed to interface the controller with the host PC to enable data visualization through the X2C-Scope plug-in. Ensure the X2C-Scope plug-in is installed. For more information on how to set up a plug-in, refer to either the Microchip Developer Help page or the web page.
-
To establish serial communication with the host PC, connect a micro-USB cable between the host PC and connector J13 on the Motor Control Development Board. This interface is also used for programming. Alternatively, connector J6 can be also used for serial communication.
-
Ensure the application is configured and running as described under section 5.2 Basic Demonstration by following steps 1 through 11.
-
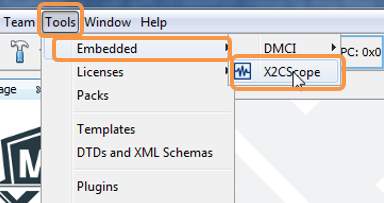
Open the X2C-Scope window by selecting Tools>Embedded>X2CScope.
-
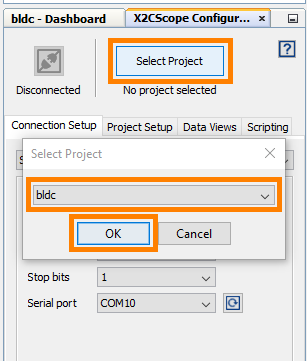
In the X2C-Scope Configuration window, open the Connection Setup tab and click Select Project. This opens the drop-down menu Select Project with a list of opened projects. Select the specific project bldc from the list of projects and click OK.
-
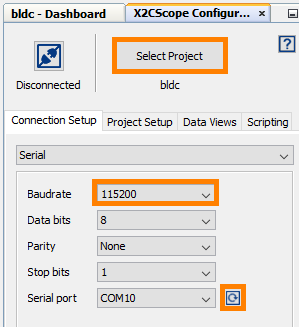
To configure and establish the serial communication for X2C-Scope, open the X2CScope Configuration window, click on the Connection Setup tab and:
- Set Baudrate as 115200, which is configured in the application firmware.
- Click on the Refresh button to refresh and update the list of the available Serial COM ports connected to the Host PC.
- Select the specific Serial port detected when interfaced with the Motor Control Development Board. The Serial port depends on the system settings
-
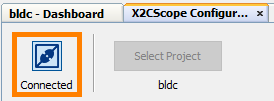
Once the Serial port is detected, click on Disconnected and turn to Connected, to establish serial communication between the Host PC and the board.
-
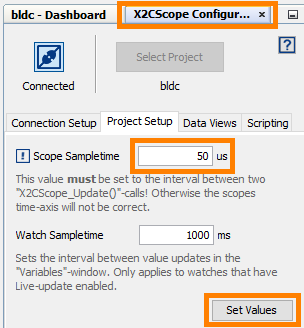
Open the Project Setup tab in the X2CScope Configuration window and,
- Set Scope Sampletime as the interval at which
X2CScopeUpdate()is called. In this application, it is every50µs. - Then, click Set Values to save the configuration.
- Set Scope Sampletime as the interval at which
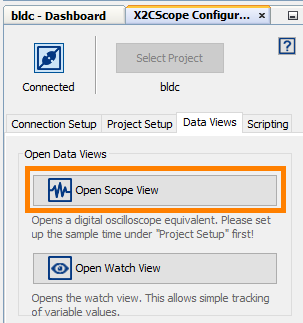
-
Click on Open Scope View (in the Data Views tab of the X2CScope Configuration Window); this opens Scope Window.
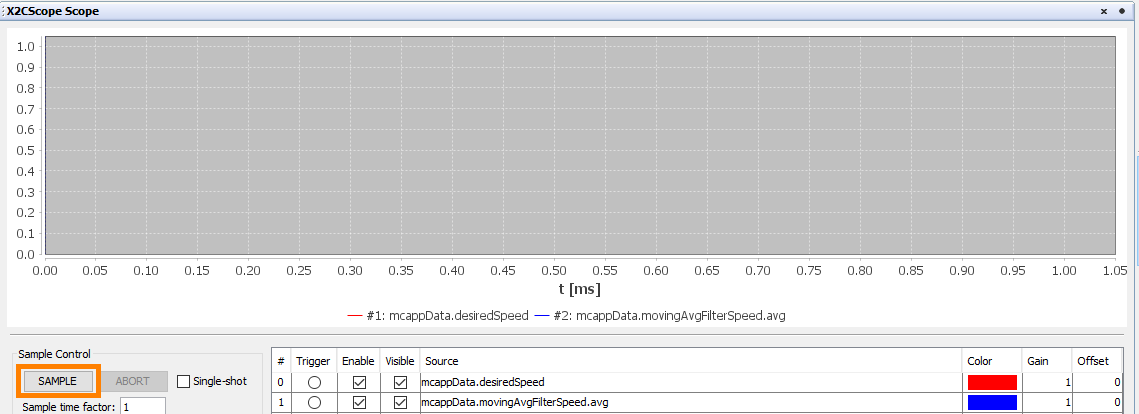
-
In the Scope Window, select the variables that must be watched. To do this, click on the Source against each channel, and a window Select Variables opens on the screen. From the available list, the required variable can be chosen. Ensure checkboxes Enable and Visible are checked for the variables to be plotted. To view data plots continuously, uncheck Single-shot. When Single-shot is checked, it captures the data once and stops. The Sample time factor value multiplied by Sample time decides the time difference between any two consecutive data points on the plot.

-
Click on SAMPLE, then the X2C-Scope window plots variables in real-time, which updates automatically.
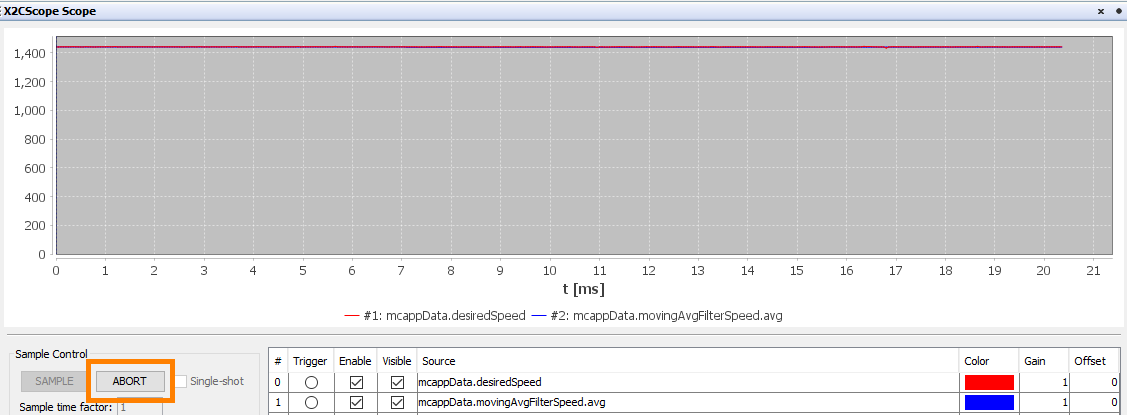
-
Click on ABORT to stop.










For additional information, refer following documents or links.
- AN957 Application Note "Sensored BLDC Motor Control Using dsPIC30F2010"
- dsPIC33CK Low Voltage Motor Control Board User’s Guide (DS50002927)
- dsPIC33CK256MP508 Family datasheet (DS70005349)
- Family Reference Manuals (FRM) of dsPIC33CK256MP508 family
- MPLAB® X IDE User’s Guide (DS50002027) or MPLAB® X IDE help
- MPLAB® X IDE installation
- MPLAB® XC16 Compiler installation
- Installation and setup of X2Cscope plugin for MPLAB X