mint_cart_ros is a package for MINT-CART of MINT LAB to get dataset and test sensor fusion.
- ROS2 humble & Ubuntu 22.04
- ASUS ROG Flow X13
- CPU : AMD Ryzen™ 9 5900HS
- GPU : NVIDIA GeForce RTX 3050 Ti Mobile
-
LiDAR : Ouster OS1-128 (ros2_ouster_drivers)
- FOV : 45°
- Resolution : 1.2 cm
- Rotation Rate : 10 to 20 Hz
-
Stereo Camera : ZED 2i (zed-ros2-wrapper)
- Resolution & FPS: WVGA to 2.2K & 15 to 100 Hz
- Depth : 0.2 to 20m, Up to 100Hz
- Built-in sensors : Accelerometer, Gyroscope, Barometer, Magnetometer, Temperature sensor
-
IMU : myAHRS+ (myahrs_ros2_driver)
- 9-DOF
- 3-Axis Gyroscope : ± 2000 dps
- 3-Axis Accelerometer : ± 16 g
- 3-Axis Geomagnetic Sensor : ± 1200 μT
- Up to 100Hz
- 9-DOF
-
GPS : Ascen-GPS-620 (nmea_navsat_driver)
- Frequeny : 1 to 10 Hz
- Accuracy
- Autonomous < 2.5m
- SBAS < 2.0m
- TTFF
- Hot start < 1s
- Warm start < 28s
- Cold start < 29s
-
GPS-RTK : SparkFun RTK Express Plus (nmea_navsat_driver)
- GNSS Receiver : ZED-F9R
- Built-in IMU (3-Axis Accel, 3-Axis Gyro)
- Frequency : Up to 20Hz(RTK)
- Accuracy
- With IMU < 30cm
- With RTK & IMU < 1.4cm
- TTFF
- Hot start < 2s
- Cold start < 25s
-

- Ubuntu 20.04 (Focal Fossa) or Ubuntu 22.04 (Jammy Jellyfish)
- ROS2 : Follow the instruction below to install ROS2 on PC.
- ZED SDK
- Install CUDA (Recommend 11.8) & cuDNN
- Following Getting started
-
Create work space
mkdir -p mint_ws/src -
Follow below instruction to install zed-ros2-wrapper ( ZED 2i )
cd ~/mint_ws/src/ #use your current ros2 workspace folder git clone --recursive https://github.com/stereolabs/zed-ros2-wrapper.git cd .. rosdep install --from-paths src --ignore-src -r -y colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release --parallel-workers $(nproc) echo source $(pwd)/install/local_setup.bash >> ~/.bashrc source ~/.bashrc -
Download or git clone below packages
- ros2_ouster_drivers ( OS-1 LiDAR )
- nmea_navsat_driver ( Asen GPS )
- myahrs_ros2_driver ( myAHRS+ )
-
Install packages using below commands.
cd mint_ws colcon build --symlink-install source ~/.bashrcNote: If you using ros2 humble(22.04), you might got this error when build myahrs_ros2
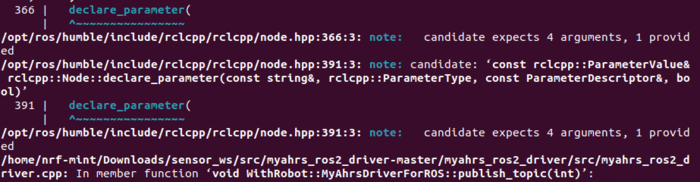
This is due to this package is made for foxy and declare_parameter don't have default value in humble(foxy, humble). So, you have to insert default value.
To insert, open mint_ws/src/myahrs_ros2_driver-master/myahrs_ros2_driver/src/myahrs_ros2_driver.cppNext, insert default value end of declare_parameter function
namespace WithRobot { MyAhrsDriverForROS::MyAhrsDriverForROS(std::string port, int baud_rate) : iMyAhrsPlus(port, baud_rate), Node("myahrs_ros2") { // dependent on user device publish_tf_ = false; frame_id_ = "imu_link"; parent_frame_id_ = "base_link"; this->declare_parameter("linear_acceleration_stddev", 0.0); this->declare_parameter("angular_velocity_stddev", 0.0); this->declare_parameter("magnetic_field_stddev", 0.0); this->declare_parameter("orientation_stddev", 0.0); this->get_parameter( "linear_acceleration_stddev", linear_acceleration_stddev_); this->get_parameter("angular_velocity_stddev", angular_velocity_stddev_); this->get_parameter("magnetic_field_stddev", magnetic_field_stddev_); this->get_parameter("orientation_stddev", orientation_stddev_);
This values will be updated based on your .config or .yaml file when you launch the node using .launch.py.
So, don't worry about value and just match value type. (If parameters are not declared in .config or .yaml, you need to insert your values)

To change port name, you have to change .config or .yaml file due to original launch.py files not declare this variable as a parameter. Therefore, converting this variable into a declared parameter is convenient.
Forexample, if you want to change nmea_navsat_driver, replace nmea_serial_driver.launch.py to below code.
import os
import sys
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription, LaunchIntrospector, LaunchService
from launch_ros import actions
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
def generate_launch_description():
"""Generate a launch description for a single serial driver."""
config_file = os.path.join(get_package_share_directory("nmea_navsat_driver"), "config", "nmea_serial_driver.yaml")
port_arg = DeclareLaunchArgument('port', default_value='/dev/ttyACM2')
driver_node = actions.Node(
package='nmea_navsat_driver',
executable='nmea_serial_driver',
output='screen',
remappings=[("fix", "ascen/fix")],
parameters=[config_file, {'port': LaunchConfiguration('port')}])
return LaunchDescription([port_arg, driver_node])
def main(argv):
ld = generate_launch_description()
print('Starting introspection of launch description...')
print('')
print(LaunchIntrospector().format_launch_description(ld))
print('')
print('Starting launch of launch description...')
print('')
ls = LaunchService()
ls.include_launch_description(ld)
return ls.run()
if __name__ == '__main__':
main(sys.argv)Next, remove port: parameter in ublox_gps/config/zed_f9p.yaml.
Open terminal and input below code to check changed launch.py file.
ros2 launch nmea_navsat_driver nmea_serial_driver.launch.py -s