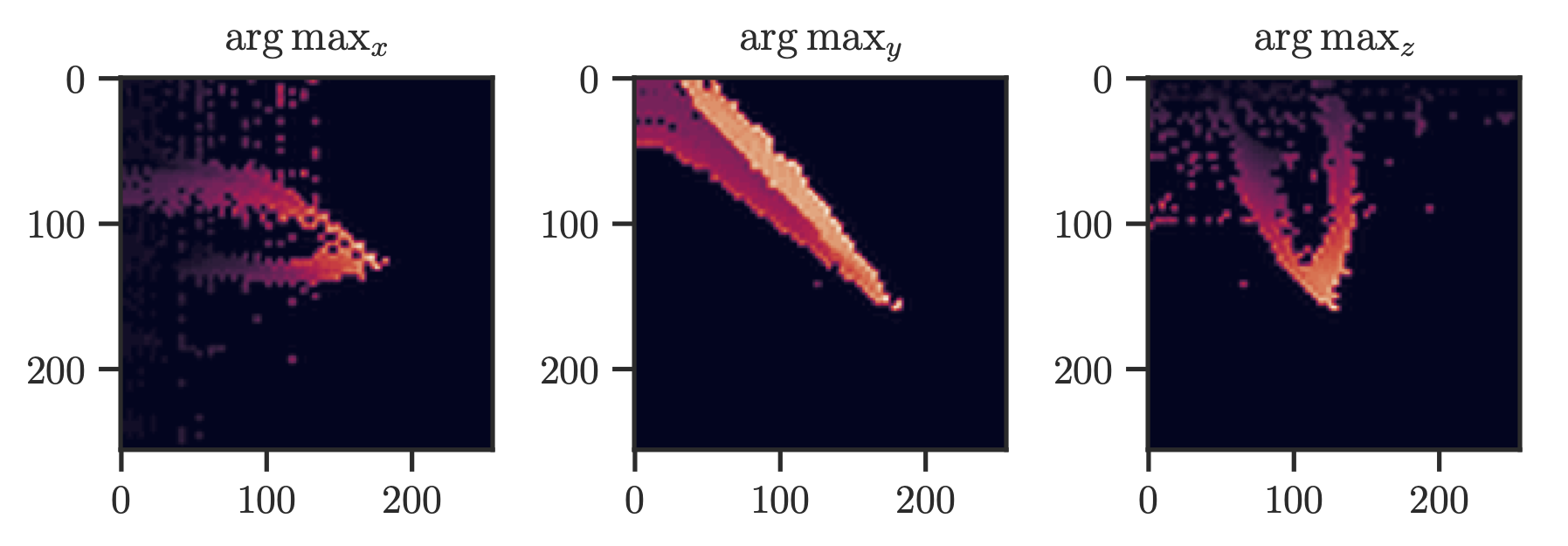
 Figure: Example image from OCT data set showing arg max projections of a surgical needle tip acquired by optical coherence tomography.
Figure: Example image from OCT data set showing arg max projections of a surgical needle tip acquired by optical coherence tomography.
If you use this data set in your work, please cite
Laves, MH., Ihler, S., Fast, JF., Kahrs, LA., Ortmaier, T. Well-Calibrated Regression Uncertainty in Medical Imaging with Deep Learning. Medical Imaging with Deep Learning (MIDL), 2020.
https://openreview.net/forum?id=CecZ_0t79q
This data set was created by attaching a surgical needle to a high-precision six-axis hexapod robot (H-826, Physik Instrumente GmbH & Co. KG, Germany) and observing the needle tip with 3D optical coherence tomography (OCS1300SS, Thorlabs Inc., USA). The data set consists of 5,000 OCT acquisitions with 64 × 64 × 512 voxels, covering a volume of 3 approx. 3 × 3 × 3 mm. Each acquisition is taken at a different robot configuration and labeled with the corresponding 6DoF pose. The data are characterized by a high amount of speckle noise, which is a typical phenomenon in optical coherence tomography.
You can read the data using the following Python code:
import numpy as np
f = np.load("1565077565.9816186.npz")
img = f['data']
pos = f['pos']
img = img.transpose(2, 0, 1) # permute data as it is in FORTRAN orderThe PyTorch dataloader as used in the paper can be found in file data_generator_oct.py (including data preprocessing).
Max-Heinrich Laves
laves@imes.uni-hannover.de
@MaxLaves
Institute of Mechatronic Systems
Leibniz Universität Hannover
An der Universität 1, 30823 Garbsen, Germany