![]()

Some maze environments for reinforcement learning (RL) based on mujoco-py and openai gym.
Thankfully, this project is based on the code from rllab and tensorflow/models.
Note that d4rl and dm_control have similar maze environments, and you can also check them. But, if you want more customizable or minimal one, I recommend this.
Importing mujoco_maze registers environments and you can load
environments by gym.make.
All available environments listed are listed in [Environments] section.
E.g.,:
import gym
import mujoco_maze # noqa
env = gym.make("Ant4Rooms-v0")-
PointUMaze/AntUmaze/SwimmerUmaze
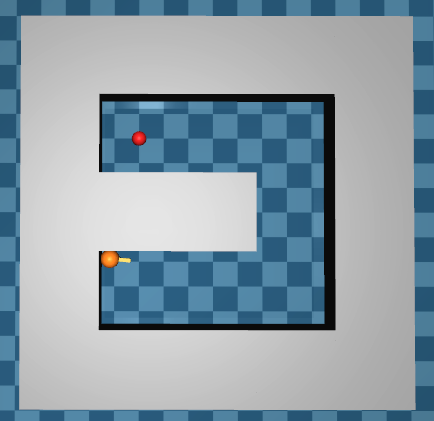
- PointUMaze-v0/AntUMaze-v0/SwimmerUMaze-v0 (Distance-based Reward)
- PointUmaze-v1/AntUMaze-v1/SwimmerUMaze-v (Goal-based Reward i.e., 1.0 or -ε)
-
PointSquareRoom/AntSquareRoom/SwimmerSquareRoom
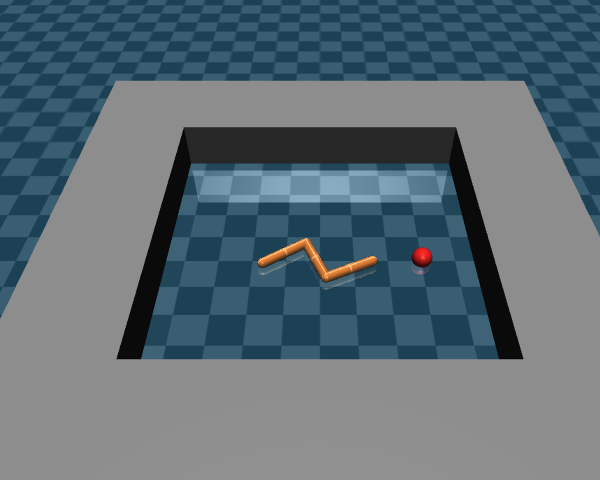
- PointSquareRoom-v0/AntSquareRoom-v0/SwimmerSquareRoom-v0 (Distance-based Reward)
- PointSquareRoom-v1/AntSquareRoom-v1/SwimmerSquareRoom-v1 (Goal-based Reward)
- PointSquareRoom-v2/AntSquareRoom-v2/SwimmerSquareRoom-v2 (No Reward)
-
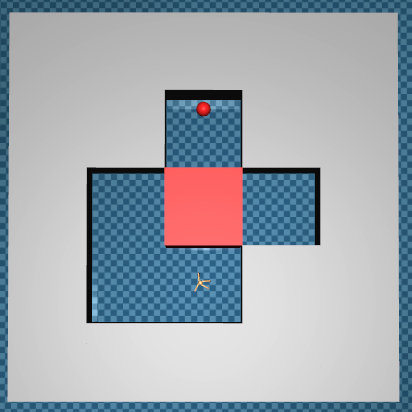
Point4Rooms/Ant4Rooms/Swimmer4Rooms
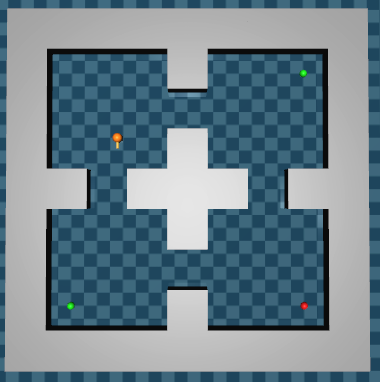
- Point4Rooms-v0/Ant4Rooms-v0/Swimmer4Rooms-v0 (Distance-based Reward)
- Point4Rooms-v1/Ant4Rooms-v1/Swimmer4Rooms-v1 (Goal-based Reward)
- Point4Rooms-v2/Ant4Rooms-v2/Swimmer4Rooms-v2 (Multiple Goals (0.5 pt or 1.0 pt))
-
PointCorridor/AntCorridor/SwimmerCorridor
- PointCorridor-v0/AntCorridor-v0/SwimmerCorridor-v0 (Distance-based Reward)
- PointCorridor-v1/AntCorridor-v1/SwimmerCorridor-v1 (Goal-based Reward)
- PointCorridor-v2/AntCorridor-v2/SwimmerCorridor-v2 (No Reward)
-
PointPush/AntPush
- PointPush-v0/AntPush-v0 (Distance-based Reward)
- PointPush-v1/AntPush-v1 (Goal-based Reward)
-
PointFall/AntFall
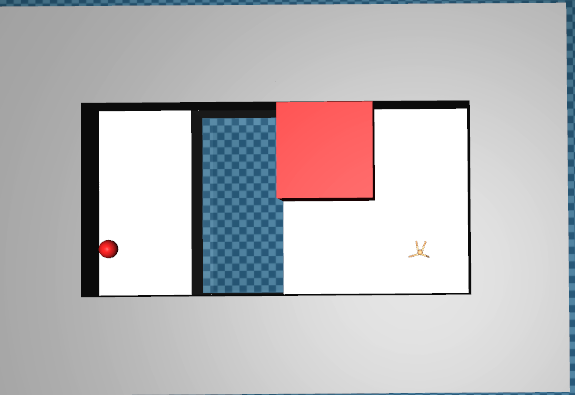
- PointFall-v0/AntFall-v0 (Distance-based Reward)
- PointFall-v1/AntFall-v1 (Goal-based Reward)
-
PointBilliard
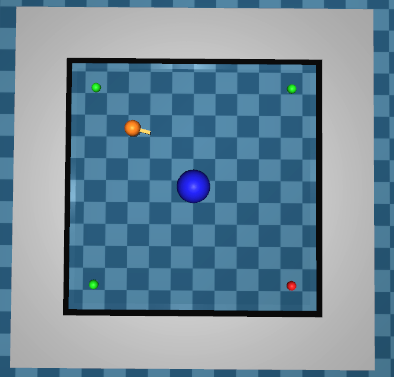
- PointBilliard-v0 (Distance-based Reward)
- PointBilliard-v1 (Goal-based Reward)
- PointBilliard-v2 (Multiple Goals (0.5 pt or 1.0 pt))
- PointBilliard-v3 (Two goals (0.5 pt or 1.0 pt))
- PointBilliard-v4 (No Reward)







You can define your own task by using components in maze_task.py,
like:
import gym
import numpy as np
from mujoco_maze.maze_env_utils import MazeCell
from mujoco_maze.maze_task import MazeGoal, MazeTask
from mujoco_maze.point import PointEnv
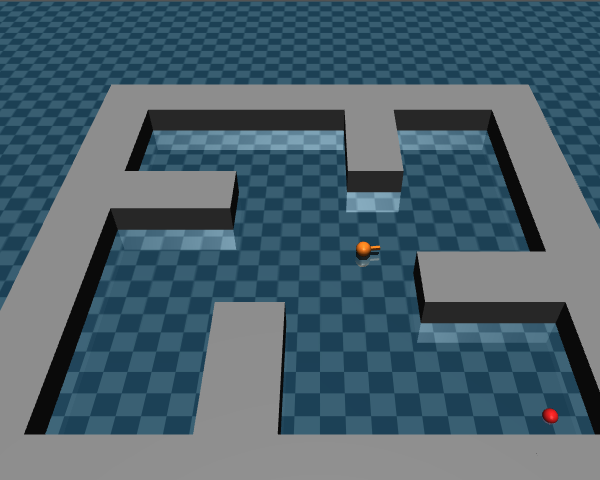
class GoalRewardEMaze(MazeTask):
REWARD_THRESHOLD: float = 0.9
PENALTY: float = -0.0001
def __init__(self, scale):
super().__init__(scale)
self.goals = [MazeGoal(np.array([0.0, 4.0]) * scale)]
def reward(self, obs):
return 1.0 if self.termination(obs) else self.PENALTY
@staticmethod
def create_maze():
E, B, R = MazeCell.EMPTY, MazeCell.BLOCK, MazeCell.ROBOT
return [
[B, B, B, B, B],
[B, R, E, E, B],
[B, B, B, E, B],
[B, E, E, E, B],
[B, B, B, E, B],
[B, E, E, E, B],
[B, B, B, B, B],
]
gym.envs.register(
id="PointEMaze-v0",
entry_point="mujoco_maze.maze_env:MazeEnv",
kwargs=dict(
model_cls=PointEnv,
maze_task=GoalRewardEMaze,
maze_size_scaling=GoalRewardEMaze.MAZE_SIZE_SCALING.point,
inner_reward_scaling=GoalRewardEMaze.INNER_REWARD_SCALING,
)
)You can also customize models. See point.py or so.
Reacher enviroments are not tested.
By passing a port like gym.make("PointEMaze-v0", websock_port=7777),
one can use a web-based visualizer when calling env.render().

This feature is experimental and can produce some zombie proceses.
This project is licensed under Apache License, Version 2.0 (LICENSE or http://www.apache.org/licenses/LICENSE-2.0).