Xin Kong · Shikun Liu · Marwan Taher · Andrew Davison
Paper | Video | Project Page
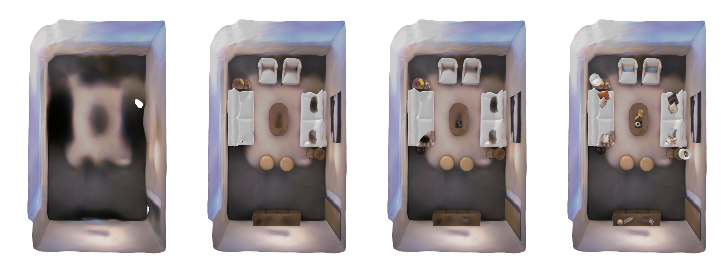
vMAP builds an object-level map from a real-time RGB-D input stream. Each object is represented by a separate MLP neural field model, all optimised in parallel via vectorised training.
We provide the implementation of the following neural-field SLAM frameworks:
- vMAP [Official Implementation]
- iMAP [Simplified and Improved Re-Implementation, with depth guided sampling]
First, let's start with a virtual environment with the required dependencies.
conda env create -f environment.ymlPlease download the following datasets to reproduce our results.
- Replica Demo - Replica Room 0 only for faster experimentation.
- Replica - All Pre-generated Replica sequences. For Replica data generation, please refer to directory
data_generation. - ScanNet - Official ScanNet sequences.
Each dataset contains a sequence of RGB-D images, as well as their corresponding camera poses, and object instance labels.
To extract data from ScanNet .sens files, run
conda activate py2 python2 reader.py --filename ~/data/ScanNet/scannet/scans/scene0024_00/scene0024_00.sens --output_path ~/data/ScanNet/objnerf/ --export_depth_images --export_color_images --export_poses --export_intrinsics
Then update the config files in configs/.json with your dataset paths, as well as other training hyper-parameters.
"dataset": {
"path": "path/to/ims/folder/",
}The following commands will run vMAP / iMAP in a single-thread setting.
python ./train.py --config ./configs/Replica/config_replica_room0_vMAP.json --logdir ./logs/vMAP/room0 --save_ckpt Truepython ./train.py --config ./configs/Replica/config_replica_room0_iMAP.json --logdir ./logs/iMAP/room0 --save_ckpt TrueTo evaluate the quality of reconstructed scenes, we provide two different methods,
The same metrics following the original iMAP, to compare with GT scene meshes by Accuracy, Completion and Completion Ratio.
python ./metric/eval_3D_scene.pyWe also provide the object-level metrics by computing the same metrics but averaging across all objects in a scene.
python ./metric/eval_3D_obj.pyWe provide raw results, including 3D meshes, 2D novel view rendering, and evaluated metrics of vMAP and iMAP* for easier comparison.
We would like thank the following open-source repositories that we have build upon for the implementation of this work: NICE-SLAM, and functorch.
If you found this code/work to be useful in your own research, please considering citing the following:
@article{kong2023vmap,
title={vMAP: Vectorised Object Mapping for Neural Field SLAM},
author={Kong, Xin and Liu, Shikun and Taher, Marwan and Davison, Andrew J},
journal={arXiv preprint arXiv:2302.01838},
year={2023}
}@inproceedings{sucar2021imap,
title={iMAP: Implicit mapping and positioning in real-time},
author={Sucar, Edgar and Liu, Shikun and Ortiz, Joseph and Davison, Andrew J},
booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision},
pages={6229--6238},
year={2021}
}