![]()
![]()
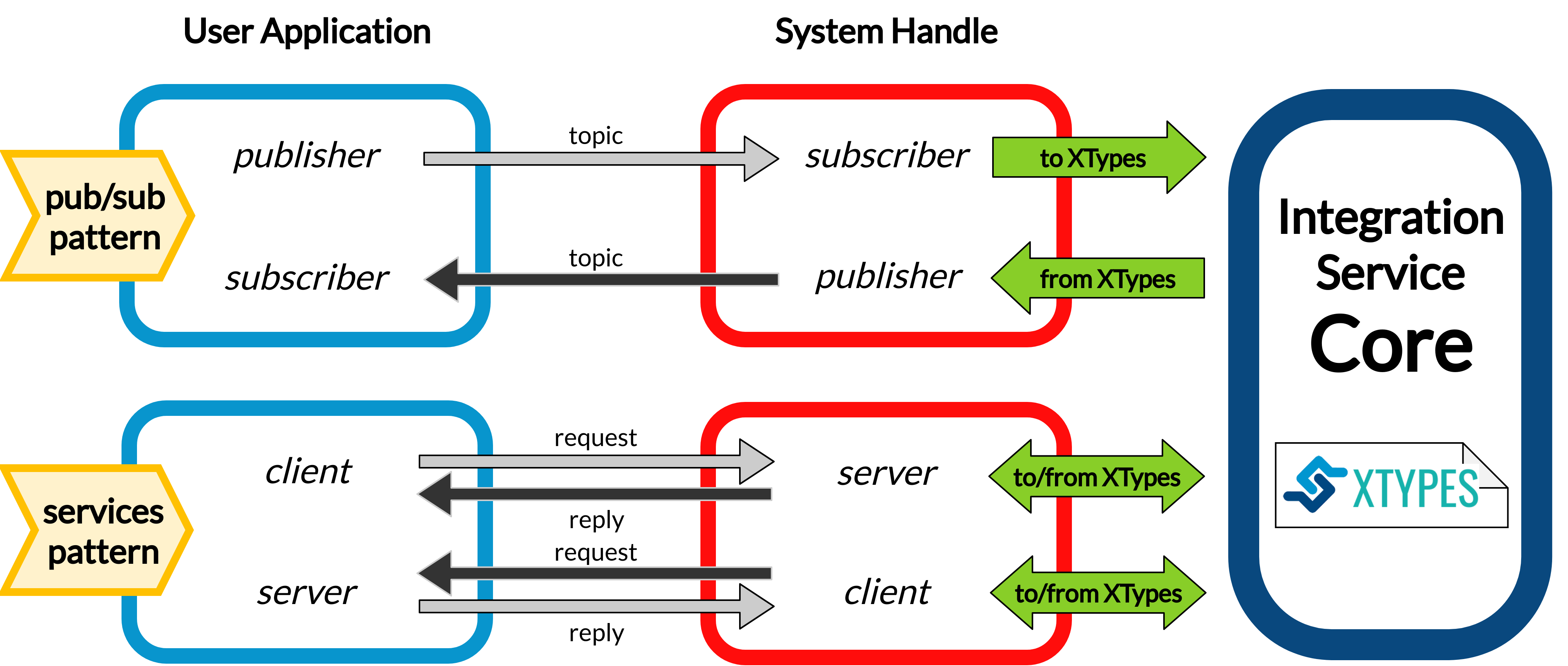
A System Handle is a plugin that allows a certain middleware or communication protocol to speak the same language used by the eProsima Integration Service, that is, Extensible and Dynamic Topic Types for DDS (xTypes); specifically, Integration Service bases its intercommunication abilities on eProsima's open source implementation for the xTypes protocol, that is, eProsima xTypes.
![]()
This repository contains the source code of Integration Service System Handle for the ROS 1 middleware protocol, widely used in the robotics field.
The main purpose of the ROS 1 System Handle is that of establishing a connection between a ROS 1 application and an application running over a different middleware implementation. This is the classic use-case approach for Integration Service.
This section provides a list of the dependencies needed in order to compile ROS 1 System Handle.
- ROS 1: Melodic/Noetic ROS 1 distribution.
Integration Service is configured by means of a YAML configuration file, which specifies the middlewares, topics and/or services involved in the intercommunication process, as well as their topic/service types and the data exchange flow. This configuration file is loaded during runtime, so there is no need to recompile any package before switching to a whole new intercommunication architecture.
To get a more precise idea on how these YAML files have to be filled and which fields they require in order to succesfully configure and launch an Integration Service project, please refer to the dedicated configuration section of the official documentation.
Regarding the ROS 1 System Handle, there are several specific parameters which can be configured for the ROS 1 middleware. All of these parameters are optional, and fall as suboptions of the main five sections described in the Configuration chapter of Integration Service repository:
-
systems: The systemtypemust beros1. In addition to thetypeandtypes-fromfields, the ROS 1 System Handle accepts the following specific configuration fields:systems: ros1: type: ros1 node_name: "my_ros1_node"
node_name: The ROS 1 System Handle node name.
-
topics: The topicroutemust containros1within itsfromortofields. Additionally, the ROS 1 System Handle accepts the following topic specific configuration parameters, within theros1specific middleware configuration tag:routes: ros2_to_ros1: { from: ros2, to: ros1 } ros1_to_dds: { from: ros1, to: dds } topics: hello_ros1: type: std_msgs/String route: ros2_to_ros1 ros1: { queue_size: 10, latch: false } hello_dds: type: std_msgs/String route: ros1_to_dds ros1: { queue_size: 5 }
queue_size: The maximum message queue size for the ROS 1 publisher or subscription.latch: Enable or disable latching. When a connection is latched, the last message published is saved and sent to any future subscribers that connect. This configuration parameter only makes sense for ROS 1 publishers, so it is only useful for routes where the ROS 1 System Handle acts as a publisher, that is, for routes whereros1is included in thetolist.
There are several Integration Service examples using the ROS 1 System Handle available in the project's main source code repository.
One of these examples, where the ROS 1 System Handle takes part in the intercommunication process, is introduced here.
In this example, Integration Service uses both this ROS 1 System Handle and the ROS 2 System Handle to transmit data coming from a ROS 1 publisher into the ROS 2 data space, so that it can be consumed by a ROS 2 subscriber on the same topic, and viceversa.

The configuration file used by Integration Service for this example can be found here.
For a detailed step by step guide on how to build and test this example, please refer to the dedicated section in the official documentation.
In this example, the ROS 1 System Handle tackles the task of bridging a ROS 1 server with one or more client applications, playing the role of a service server capable of processing incoming requests from several middlewares (DDS, ROS2, WebSocket) and producing an appropriate answer for them.

The configuration file used by Integration Service for this example can be found here.
For a detailed step by step guide on how to build and test this example, please refer to the dedicated section in the official documentation.
Besides the global compilation flags available for the whole Integration Service product suite, there are some specific flags which apply only to the ROS 1 System Handle; they are listed below:
-
BUILD_ROS1_TESTS: Allows to specifically compile the ROS 1 System Handle unitary and integration tests; this is useful to avoid compiling each System Handle's test suite present in thecolconworkspace, which is what would happen if using theBUILD_TESTSflag; and thus, minimizing the building time; to use it, after making sure that the ROS 1 System Handle is present in thecolconworkspace, the following command must be executed:~/is_ws$ colcon build --cmake-args -DBUILD_ROS1_TESTS=ON -
MIX_ROS_PACKAGES: It accepts as an argument a list of ROS packages, such asstd_msgs,geometry_msgs,sensor_msgs,nav_msgs... for which the required transformation library to convert the specific ROS 1 type definitions into xTypes, and the other way around, will be built. This list is shared with the ROS 2 System Handle, meaning that the ROS packages specified in theMIX_ROS_PACKAGESvariable will also be built for ROS 2 if the corresponding System Handle is present within the Integration Service workspace. To avoid possible errors, if a certain package is only present in ROS 1, theMIX_ROS1_PACKAGESflag must be used instead.These transformation libraries are also known within the Integration Service context as
Middleware Interface Extensionormixlibraries.By default, only the
std_msgs_mixlibrary is compiled, unless theBUILD_TESTSorBUILD_ROS1_TESTSis used, case in which some additional ROS 1 packagesmixfiles required for testing will be built.If the user wants to compile some additional packages to use them with Integration Service, the following command must be launched to compile it, adding as much packages to the list as desired:
~/is_ws$ colcon build --cmake-args -DMIX_ROS_PACKAGES="std_msgs geometry_msgs sensor_msgs nav_msgs"
-
MIX_ROS1_PACKAGES: It is used just as theMIX_ROS_PACKAGESflag, but will only affect ROS 1; this means that themixgeneration engine will not search within the ROS 2 packages, allowing to compile specific ROS 1 packages independently.For example, if a user wants to compile a certain package
dummy_msgsindependently from ROS 1, but compilingstd_msgsandgeometry_msgsfor both the ROS 1 and ROS 2 System Handles, the following command should be executed:~/is_ws$ colcon build --cmake-args -DMIX_ROS_PACKAGES="std_msgs geometry_msgs" -DMIX_ROS1_PACKAGES="dummy_msgs"
The official documentation for the ROS 1 System Handle is included within the official Integration Service documentation, hosted by Read the Docs, and comprises the following sections:
This repository is open-sourced under the Apache-2.0 license. See the LICENSE file for more details.
If you need support you can reach us by mail at support@eProsima.com or by phone at +34 91 804 34 48.