This repository contains source code for embeddedRTPS, a portable and open-source C++ implementation of the Real-Time Publish-Subscribe Protocol (RTPS) for embedded system. RTPS is based on the publish-subscribe mechanism and is at the core of the Data Distribution Service (DDS). DDS is used, among many other applications, in Robot Operating System 2 (ROS2) and is also part of the AUTOSAR Adaptive platform. embeddedRTPS allows to integrate Ethernet-capable microcontrollers into DDS-based systems as first-class participants.
embeddedRTPS is portable, as it only consumes lightweightIP and FreeRTOS APIs, which are available for a large number of embedded systems. embeddedRTPS avoids dynamic memory allocation once endpoints are constructed possible. Please note that embeddedRTPS only implements rudimentary Quality-of-Service (QoS) policies and is far from a complete RTPS implementation.
More information is provided in our ITSC'2019 publication [1], which we kindly ask you to consider citing if you find embeddedRTPS helpful for your work.
Discovery Simple Participant Discovery Protocol (SPDP) as well as Simple Endpoint Discovery Protocol (SEDP) are implemented.
Interoperability We have sucessfully tested interoperability with FastDDS 2.3.1
QoS Policies Both reliable as well as best-effort endpoints are implemented.
UDP Multicast Our implementation supports multicast locators.
Message Size Message size is currently limited by lwIP buffer size and are not split up among multiple buffers
We have successfully ported embeddedRTPS on the following platforms:
- Infineon Aurix
- Xilinx UltraScale+ Cortex R5
- STM32F767ZI
Due to license issues, we can only make source code available for the STM32.
The following repository provides code examples for running embeddedRTPS on the STM32F767ZI
The following repository allow to compile and run embeddedRTPS on Linux for development purposes. This repository also contains unittests for embeddedRTPS.
embeddedRTPS makes use of the following third party libraries:
- lwIP (Raw Mode)
- FreeRTOS
- eProsima Micro-CDR
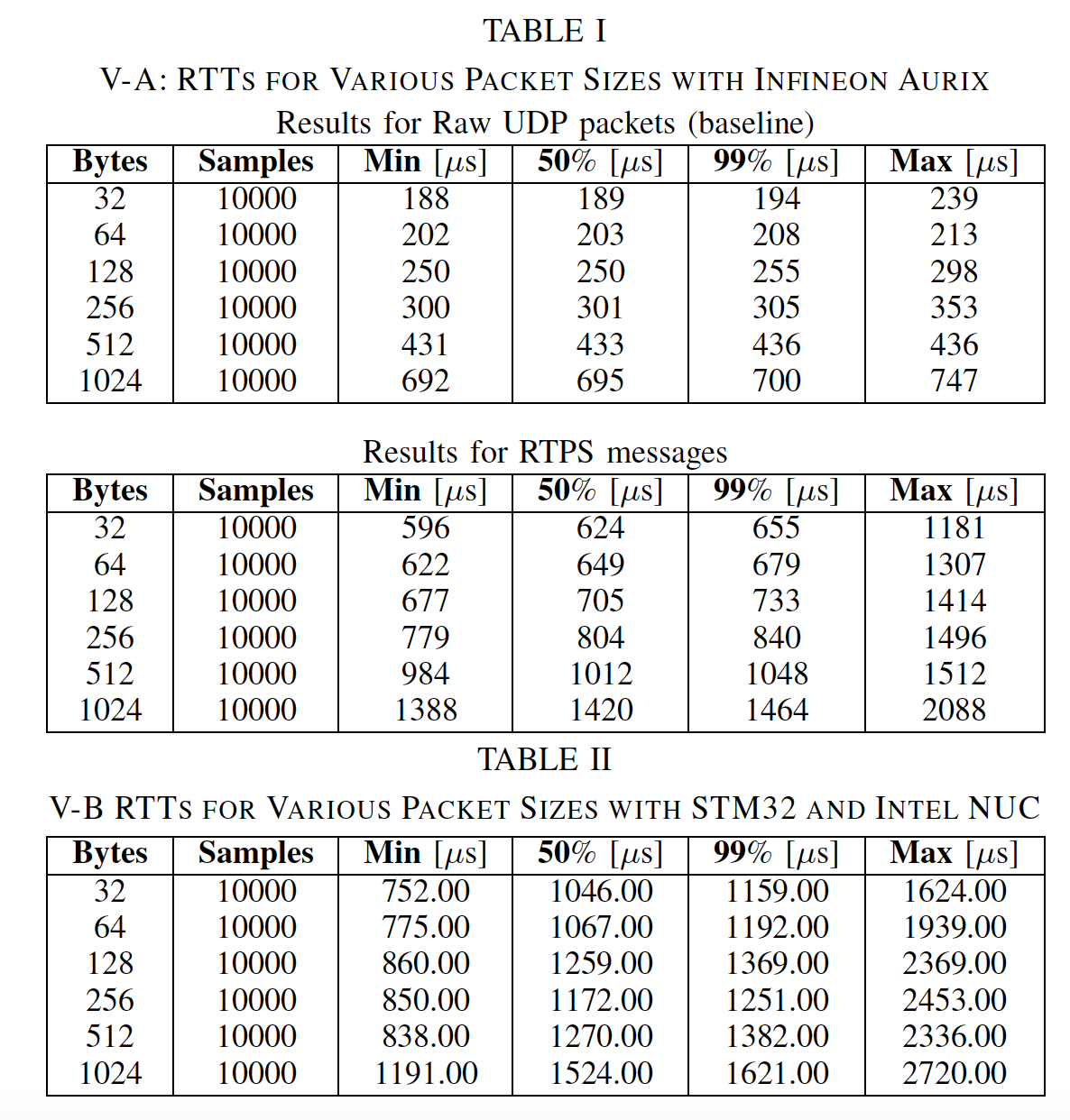
Round-trip-times (RTT) for different platforms and packet sizes are depicted in the tables below.
Table 1 2x Infineon Aurix TC277 running embeddedRTPS.
Table 2 STM32F7 running embeddedRTPS connected to an Intel NUC running eProsima FastRTPS 1.8.0.
embeddedRTPS has been developed at i11 - Embedded Software, RWTH Aachen University in the context of the UNICARagil project.
This research is accomplished within the project “UNICARagil” (FKZ EM2ADIS002). We acknowledge the financial support for the project by the Federal Ministry of Education and Research of Germany (BMBF).
[1] A. Kampmann, A. Wüstenberg, B. Alrifaee and S. Kowalewski, "A Portable Implementation of the Real-Time Publish-Subscribe Protocol for Microcontrollers in Distributed Robotic Applications," 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 2019, pp. 443-448. doi: 10.1109/ITSC.2019.8916835
@INPROCEEDINGS{8916835,
author={A. {Kampmann} and A. {Wüstenberg} and B. {Alrifaee} and S. {Kowalewski}},
booktitle={2019 IEEE Intelligent Transportation Systems Conference (ITSC)},
title={A Portable Implementation of the Real-Time Publish-Subscribe Protocol for Microcontrollers in Distributed Robotic Applications},
year={2019},
volume={},
number={},
pages={443-448},
keywords={automobiles;intelligent transportation systems;microcontrollers;middleware;operating systems (computers);protocols;robot programming;Robot Operating System 2;microcontrollers;distributed automotive applications;distributed robotic applications;Data Distribution Service;DDS;open-source RTPS implementations;publish-subscribe protocol;AUTOSAR Adaptive platform;Protocols;Automotive engineering;Message systems;Real-time systems;Microcontrollers;Middleware;Operating systems},
doi={10.1109/ITSC.2019.8916835},
ISSN={null},
month={Oct},}