
This is the toolkit for RICH dataset in Capturing and Inferring Dense Full-BodyHuman-Scene Contact. It consists of a few light weight scripts demonstrating how to use the released files, e.g., visualizing body keypoints on images, parsing meta data etc.
The body-scene contact network (BSTRO) is released in another repo.
python3 -m venv PATH/2/VENV
source PATH/2/VENV/bin/activate
pip install -r requirements.txt
Please download the RICH dataset and SMPL-X model from the official websites and organize them following the structure below:
${REPO_DIR}
|-- body_models
| |-- smplx
| | |-- SMPLX_FEMALE.pkl
| | |-- SMPLX_FEMALE.npz
| | |-- SMPLX_MALE.pkl
| | |-- SMPLX_MALE.npz
| | |-- SMPLX_NEUTRAL.pkl
| | |-- SMPLX_NEUTRAL.npz
| | |-- ...
|-- data
| |-- bodies
| | |-- train
| | | |--BBQ_001_guitar
| | | |--BBQ_001_juggle
| | | |--...
| | |-- val
| | |-- test
| |-- human_scene_contact
| | |-- train
| | | |--BBQ_001_guitar
| | | |--BBQ_001_juggle
| | | |--...
| | |-- val
| | |-- test
| |-- images
| | |-- train
| | | |--BBQ_001_guitar
| | | |--BBQ_001_juggle
| | | |--...
| | |-- val
| | |-- test
| |-- multicam2world
| | |-- BBQ_multicam2world.json
| | |-- Gym_multicam2world.json
| | |-- ...
| | |-- ...
| |-- scan_calibration
| | |-- BBQ
| | |-- Gym
| | |-- ...
| | |-- ...
-
Get 3D joints from SMPL-X params and project them onto an image:
python smplx2images.pyand check the results in
samplesfolder. -
Load human-scene contact annotations:
python hsc_params.pyand check the variables
hsc_vert_id_smplandhsc_vert_id_smplx. -
Visualize scans and SMPL-X bodies in world frames: The released SMPL-X params and the scene scan reside in the calibrated multi-camera coordinate, where the first camera is conventionally chosen as the reference (R=I, t=0) so the ground plane is often not axis-aligned. When an axis-aligned ground plane is required, one can consider transforming bodies and the scene mesh to the world frame defined during the scanning process:
python multicam2world.pyVisualizing the generated
body_scene_world.plyinsamplesfolder with meshlab, one shall see: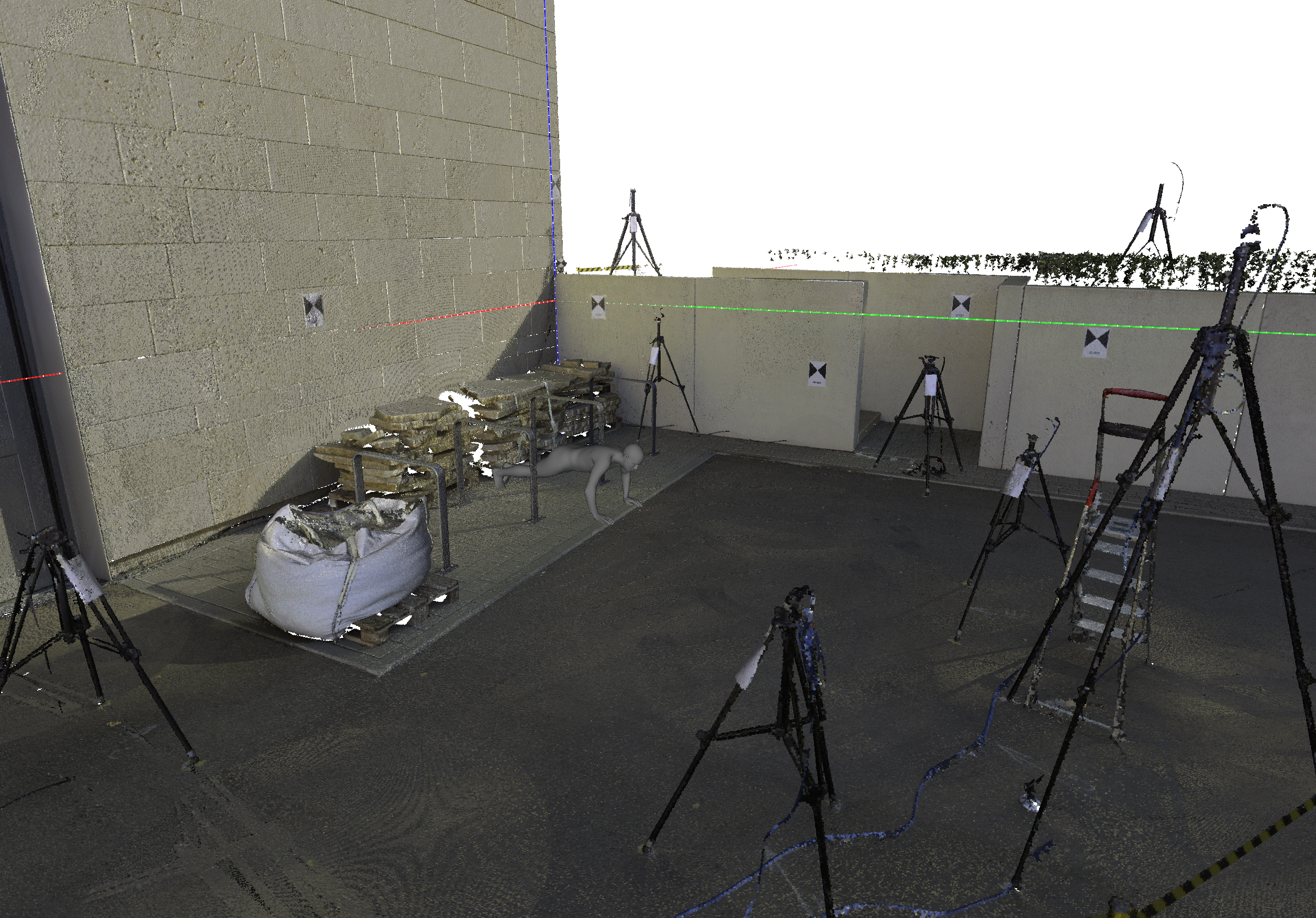

If you find our work useful in your research, please consider citing:
@inproceedings{huang2022rich,
title = {Capturing and Inferring Dense Full-Body Human-Scene Contact},
author = {Huang, Chun-Hao P. and Yi, Hongwei and H{\"o}schle, Markus and Safroshkin, Matvey and Alexiadis, Tsvetelina and Polikovsky, Senya and Scharstein, Daniel and Black, Michael J.},
booktitle = {IEEE/CVF Conf.~on Computer Vision and Pattern Recognition (CVPR) },
pages = {13274-13285},
month = jun,
year = {2022},
month_numeric = {6}
}