1、按现有黄钢程序,机头升降功能正常,上升速度200,下降速度300,圣东尼反应比之前的慢点,但是也可以接受。
2、需要有保护功能,上/下限位传感器损坏要有保护功能,升降电机不能一直转,圣东尼进口机器是这样实现的:
整个升降行程是100个脉冲,限位点是95个脉冲,那么在发送98个脉冲后,还没有检测到限位,就停止运行报警,
所以即使限位丢失,也能很及时的保护。
3、中间停止功能,要一直触发(停机+升/降)按钮,升降电机才会运行,一旦释放按钮,电机就要停止运行,再次按键,电机再次运行。
4、剪线下降功能,机头正常停在下限位,收到制版指令后,还要再下降一段距离,正常是1.25mm,电机运行1/4圈。
电机转一圈 200个脉冲(黄冈代码基础上)
电机丝杆螺距:5mm
丝杆最大行程:约125mm
最大位置默认设置:125/5x200=5000
==========走位置设置
临时停机 0xd4 +0x01 +0x00
到上限位 0xd4 + 0x01 + 0x01
到下限位 0xd4 + 0x01 + 0x02
走上下位过程中,没到位置,回原来位置 0xd4 + 0x01 +0x03
走上下位过程中,没到位置,继续走当前位置 0xd4 +0x01 +0x04
走偏移位置:走当前位置的偏移位置
往上走偏移位置 0xd4 +0x02 +0x01 + 偏移位置高0x00 + 偏移位置低0x00
往下走偏移位置 0xd4 +0x02 +0x02 + 偏移位置高0x00 + 偏移位置低0x00
===========信号和原来一样
主控发 0x71 + 0x0c ,升降板收到后先上报一次,后面有信号变化主动上报
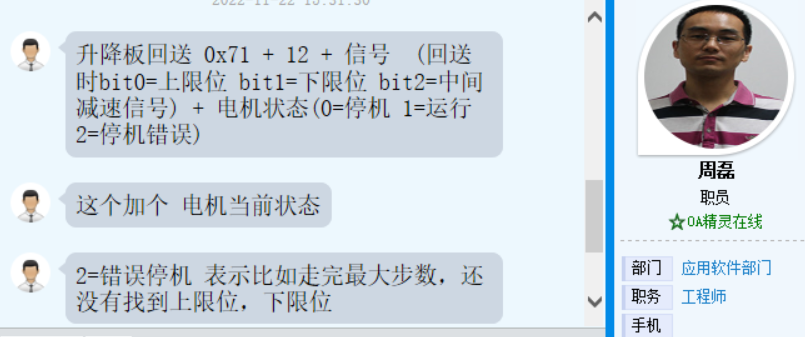
升降板回送0x71 + 0x0c + 0x00+信号 (回送时bit0=上限位 bit1=下限位 bit2=中间减速信号)
===========参数设置
方向设置 往上走的方向
0xd4 + 0x10 + 方向
电机使能 (默认上电使能)
0xd4 + 0x11 + 使能0x00
速度设置 运行速度,减速信号速度
0xd4 + 0x12 + 运行上升速度高0x00 + 运行上升速度低0x00
0xd4 + 0x13 + 运行下降速度高0x00 + 运行上升速度低0x00
0xd4 + 0x14 + 减速速度高0x00 + 减速速度低0x00
电流设置 运行电流 锁定电流
0xd4 + 0x15 + 运行电流高0x00 + 运行电流低0x00
0xd4 + 0x16 + 锁定电流高0x00 + 锁定电流低0x00(根据总电流分(Max)1-15(Min)挡,默认锁定电流是总电流的1/4)
最大位置设置
0xd4 + 0x17 + 最大位置高0x00 + 最大位置低0x00
传感器接入TCM5160电机芯片 "未在MCU管脚"
依靠SPI读电机芯片
减速点仅下降有效
查找报警后触发减速点电机依然转动 2022/12/ 9
反复测试 现象不在出现
判断电机在走 上下位过程中,没到位置回原位置模式下,误判BUG
