Neural Point Light Fields represent scenes with a light field living on a sparse point cloud. As neural volumetric rendering methods require dense sampling of the underlying functional scene representation, at hundreds of samples along with a ray cast through the volume, they are fundamentally limited to small scenes with the same objects projected to hundreds of training views. Promoting sparse point clouds to neural implicit light fields allows us to represent large scenes effectively with only a single implicit sampling operation per ray.
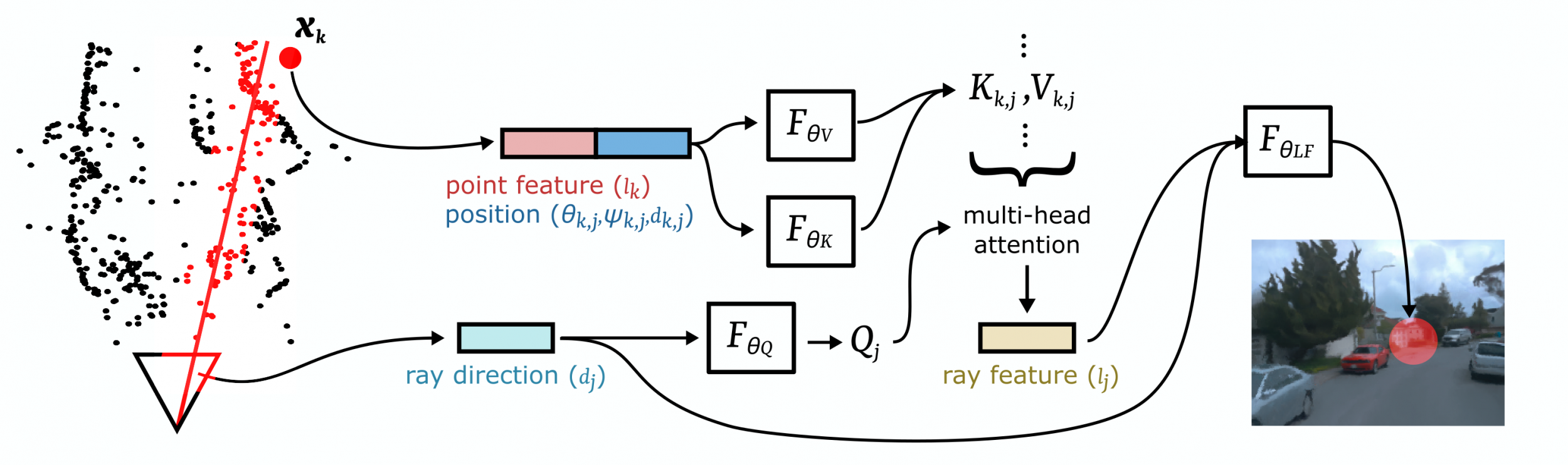
These point light fields are a function of the ray direction, and local point feature neighborhood, allowing us to interpolate the light field conditioned training images without dense object coverage and parallax. We assess the proposed method for novel view synthesis on large driving scenarios, where we synthesize realistic unseen views that existing implicit approaches fail to represent. We validate that Neural Point Light Fields make it possible to predict videos along unseen trajectories previously only feasible to generate by explicitly modeling the scene.
-
Download the compressed data of the Waymo Open Dataset: Waymo Validation Tar Files
-
To run the code as used in the paper, store as follows:
./data/validation/validation_xxxx/segment-xxxxxx -
Neural Point Light Fields is well tested on the segments mentioned in the Supplementary and shown in the experiment group
pointLF_waymo_server. -
Preprocess the data running:
./src/datasets/preprocess_Waymo.py -d "./data/validation/validation_xxxx/segment-xxxxxx" --no_data
Environment setup
conda create -n NeuralPointLF python=3.7
conda activate NeuralPointLF
Install required packages
conda install -c pytorch -c conda-forge pytorch=1.7.1 torchvision=0.8.2 cudatoolkit=11.0
conda install -c fvcore -c iopath -c conda-forge fvcore iopath
conda install -c bottler nvidiacub
conda install jupyterlab
pip install scikit-image matplotlib imageio plotly opencv-python
conda install pytorch3d -c pytorch3d
conda install -c open3d-admin -c conda-forge open3d
Add large-scale ML toolkit
pip install --upgrade git+https://github.com/haven-ai/haven-ai
In the first iteration of a scene, the point clouds will be preprocessed and stored, which might take some time.
If you want to train on unmerged point cloud data set merge_pcd=False in the config file.
Train one specific scene from the Waymo Open data set:
python trainval.py -e pointLF_waymo_server -sb <save dir> -d ./data/waymo/validation --epoch_size
100 --num_workers=<num available CPU workers for pcd preprocessing>
Reconstruct the training path (--render_only=True)
python trainval.py -e pointLF_waymo_server -sb <save dir> -d ./data/waymo/validation --epoch_size
100 --num_workers=<num available CPU workers for pcd preprocessing> --render_only=True
Argument Descriptions:
-e [Experiment group to run like 'mushrooms' (the rest of the experiment groups are in exp_configs/sps_exps.py)]
-sb [Directory where the experiments are saved]
-r [Flag for whether to reset the experiments]
-d [Directory where the datasets are aved]
Disclaimer: The codebase is optimized to run on larger GPU servers with a lot of free CPU memory.
To test on local and low memory, choose pointLF_waymo_local instead of pointLF_waymo_server.
Adjustments of batch size, chunk size and number of rays will have an effect on necessary resources.
Follow these steps to visualize plots. Open results.ipynb, run the first cell to get a dashboard like in the gif below, click on the "plots" tab, then click on "Display plots". Parameters of the plots can be adjusted in the dashboard for custom visualizations.

@InProceedings{ost2022pointlightfields,
title = {Neural Point Light Fields},
author = {Ost, Julian and Laradji, Issam and Newell, Alejandro and Bahat, Yuval and Heide, Felix},
journal = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
year = {2022}
}