A digital gearbox is an electronic device which emulates a gearbox but with dynamically adjustable gear ratios. For example, if it the ratio is set to 1/3, the output shaft should rotate 1/3 rotations for every rotation of the input shaft.
Basically it aims to replace some type of this:

with something like this (input shaft, sensor and digital gearbox not shown):

Unlike a physical gearbox with actual gears, a digital gearbox has no practical limit on how many gear ratios it can be configured to. No gears to wear down or break.
Didge digital gearbox is implemented on a low cost 32 bit microcontroller board. Thanks to the clever use of an algorithm combined with utilization of the hardware resource in the microcontroller, it can emulates a real gearbox with very low latency (<80 nanoseconds) and is able to generate a smooth motion output regardless of the selected gear ratio. No floating point representation or scaling errors. You can read about how it works here
It is implemented with the intent to replace the physical gearbox in a metal cutting lathe but can be adapted for other uses where a dynamically configurable gear reduction is needed, e.g. for synchronized motion applications.
You can see the source code in the firmware folder.
The main gearbox emulation, including smooth step generation and support for arbitrary gear ratios, is working.
Test setup is composed of a small NEMA 17 size stepper motor driven by a StepStick stepper driver board (a similar combination is used in many hobby grade 3D printers to control the print head and the platform) and a 2400 pulse/rev rotary encoder.
Below is a video with brief description of the test setup and some footage of operation, driving the stepper motor close to its limits at 1200+ RPM.
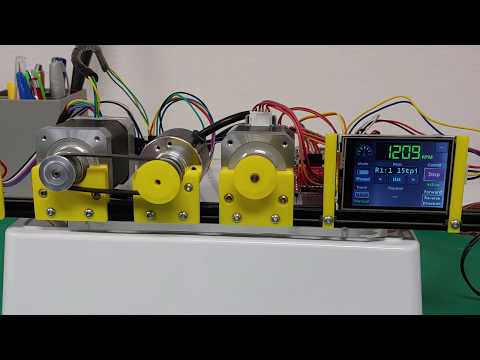
Main screen:

Thread selection screen:

Settings screen:

- Graphical user interface combined with physical buttons: See all the relevant info on the screen and operate with the touch screen or with buttons.
- Reconfigurable: All the settings needed to use on a specific machine and motor
configuration are adjustable during operation without needing source code changes.
Some of these settings are:
- Encoder pulse count (per revolution) and gearing (to the spindle)
- Encoder signal filtering
- Lead screw pitch (metric or imperial)
- Steps per revolution, micro steps and gearing to the lead screw.
- Step pulse length and direction hold time (maybe different for each stepper/servo driver)
- Acceleration, deceleration and maximum speed for the stepper
- Polarities for step and direction signals
- User defined threads
- Travel control: Starting and stopping the lead screw to control thread length or turn down to a shoulder, in synchronization with the input (i.e the spindle).
- Jogging: Move the carriage for precise positioning.
- Safety:
- Keep the motor in valid speed range, disengage if exceeded.
- E-STOP. Input and output to integrate with the rest of the system
- Motor position tracking.
- Dual motor drive: Ability use a second motor, attached to a pinion rack mechanism for example, to be used for feed mode.
- Multi-start thread support