欢迎大家在issues中挂自己mujoco开发过程中遇到的问题,也欢迎大家去帮忙解决其他人的问题,互相学习互相进步。
本文档作为一次中文mujoco建模社区的一次尝试,由于mujoco官方一直没有提供很好的例程示教,对于新手来说,很多功能开发在文档中都看不明白。全网相关的信息也不够多,很难直接定位到我们个人需要的功能,而直接在官方论坛的提问门槛太高,且不够及时。
因此我特意建了一个mujoco建模群(818977608),方便大家的讨论和交流,但是群交流的信息是零散的,有些问题是共性的,大家都会提问,这时候就需要有一个可以“长期性”的介质来保存这些信息,以便所有人的参考。 利用GitHub的issues功能,可以将群友们在利用mujoco开发过程中的问题直接贴出来,其他会的群友则可以在闲暇时间,将解决方案填上,互相学习,互相促进。 大多数人都是做强化的,相信“分布式多智能体”的力量,手动滑稽。
讨论的内容主要和强化学习物理环境建模相关,包括不限于mujoco、mujoco-py、robosuite、dm-control。 甚至可以讨论一些pybullet和ros相关的信息,但最好不要讨论强化相关的问题。
我会定期管理这个仓库,也会添加一些共性的问题和有价值的链接。
最后,大家最好直接用中文提问和回答,比较方便~
-
Linux系统完善教程,兼容Ubuntu16.04和Ubuntu18.04: 快速安装最新版mujoco200, mujoco-py2.2.0.7,gym[all],robosuite,解决gcc等报错问题
-
Windows安装,没有试过;
-
云服务器安装,也没有试过,如果能有权限安装的话,和Linux安装应该区别不大。
- gym-fetch:机械臂系列:slide,push,pick and place。
- robosuite:如果做机械臂相关的必看!斯坦福开源的Surreal机器人项目,基于Mujoco,包含单/双臂与多种手爪组合配置,task包括pick&place、装配协作等。
- flow-rl:如果做击球相关的,可以参考一下。

PyBullet笔记(一)pybullet及其依赖项的安装、pybullet初探
- 仿真部分的源代码:https://github.com/deepmind/mujoco/blob/main/sample/simulate.cc
- 上面源代码主文件和文档的对应关系可以看:https://mujoco.readthedocs.io/en/latest/programming.html
- 更新版本的文档:https://mujoco.readthedocs.io/en/latest/overview.html 对很多问题有更详细的介绍,适合深入开发的人员观看。
- 修改日志:https://mujoco.readthedocs.io/en/latest/changelog.html 好像没什么特别的内容。
- 老版本的mujoco仍然可以用,可以免费到2031年。

待更新
- 直接渲染:env.render() 需要确保路径有这个玩意儿: 可以在终端导入:
export LD_PRELOAD=/usr/lib/x86_64-linux-gnu/libGLEW.so
也可以在pycharm里面直接添加.
- 从mujoco中拿到图片:img = env.render('rgb_array', 512, 512) 如果报错:Failed to initialize OpenGL
则参考这个链接:mujoco获取rgb_array报错Failed to initialize OpenGL 注释掉:
# export LD_PRELOAD=/usr/lib/x86_64-linux-gnu/libGLEW.so
或进入pycharm的envronment virables,找到LD_PRELOAD,删掉上面那个东西就好了。
这两种渲染是不能兼容的,必须手动配置!
示例提问和回答:
Q1:请问mujoco仿真可以在哪里设置模型的初始速度吗?不知道是应该在xml文件里设置还是在控制程序里设置?
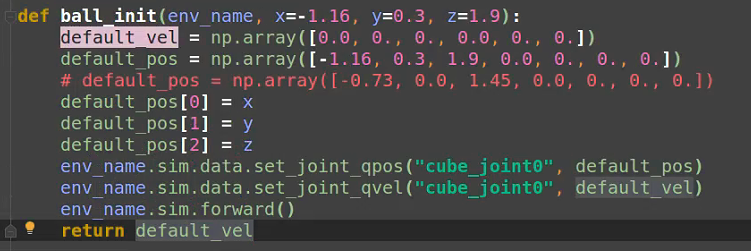
A1:通过sim.data.set_joint_qvel函数设定,或者sim.data.qvel[i]=5直接赋值。
其中sim.data.qvel[i]是得给定joint的index,set_joint_qvel函数,顾名思义是给定joint的name,才能设定速度值。
示例图片:
sim.data.set_joint_qvel得提前知道关节的名称:
sim.data.qvel[i]得提前知道关节的索引,索引可以根据函数获取:self.sim.model.get_joint_qvel_addr(joint_name),本质上还是得用关节名字
- robosuite最新版有了一些相机、纹理的域随机化操作。
- 也可以定制化一些灯光的随机化,需要的话可以加群讨论
- robosuite最新版有例程,我没试过;
- 在MUJOCO建立机器人模型:BUILDING MODELS IN MUJOCO
相信很多同学在使用robosuite的时候,会被它的has_render, has_offscreen_renderer, use_camera_obs,这三个鬼东西整的不知道该如何搭配。
更诡异的是Ubuntu16.04和Ubuntu18.04及以上的配置还不一样!
- 无图无渲染,即不需要渲染,也不需要offscreen产生图片信息:

-
渲染无图:即渲染了,但是不产生图片信息:
-
不渲染有图:即不渲染,但是在observation里面能够拿到对应相机视角下图片的数据:


包括如何从Skechup(草图大师)创建模型,导出stl文件; 到提供xml文件模板,比较齐全
超详细的文档!http://robosuite.ai/docs/overview.html

ps: 欢迎做强化的同学加群一起学习:
深度强化学习-DRL:799378128
Mujoco建模:818977608
欢迎玩其他物理引擎的同学一起玩耍~
欢迎关注知乎帐号:未入门的炼丹学徒
CSDN帐号:https://blog.csdn.net/hehedadaq
极简spinup+HER+PER代码实现:https://github.com/kaixindelele/DRLib