![]()
linorobot 

Linorobot is a suite of Open Source ROS compatible robots that aims to provide students, developers, and researchers a low-cost platform in creating new exciting applications on top of ROS.
Tutorial
You can read the full tutorial how to build your robot here.
Multiplatform
Supports multiple types of robot base:
- 2WD
- 4WD
- Ackermann Steering
- Mecanum drive

Works on:
- ROS Indigo (Ubuntu 14.04)
- ROS Kinetic (Ubuntu 16.04)
Hardware
Fabricate your own Teensy 3.1/3.2 shield,
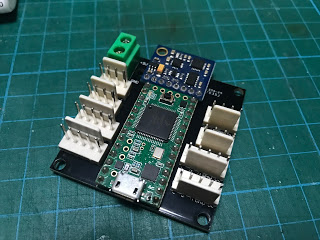
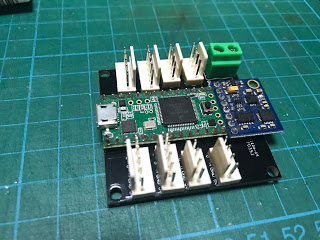
or wire it on your own. Wiring diagrams are also provided.

Supported IMUs:
- GY-85
- MPU6050
- MPU9150
- MPU9250
The IMU drivers are based on i2cdevlib.
Supported Motor Drivers:
- L298 (MAX: 35V, 2A)
- BTS7960 (MAX: 24V, 43A)
- Electronic Speed Controllers (ESC) w/ Reverse. This has been tested to control brushless motors used in RC cars and hoverboards.
Supported ROS Compatible Sensors:
- XV11 Lidar
- RPLidar
- Intel RealSense R200
- Kinect
Tested on Linux compatible ARM dev boards:
- Raspberry Pi 3
- Jetson TK1
- Jetson TX1
- Odroid XU4
- Radxa Rock Pro
**Technically this should also work with any ARM dev board at least (1GB RAM) that runs Ubuntu Trusty or Xenial.
Installation
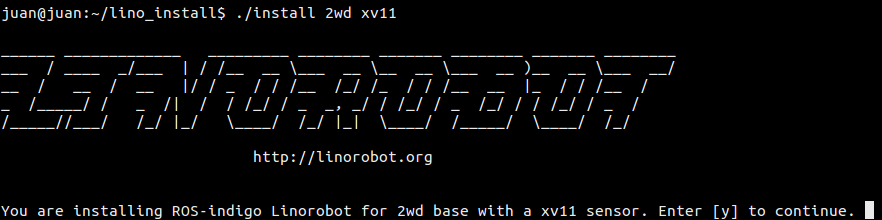
git clone https://github.com/linorobot/lino_install && cd lino_install
./install <base> <sensor>
Firmware
Flexible and configurable components. linorobot_ws/teensy/firmware/lib/config/lino_base_config.h
Robot base configuration:
//uncomment the base you're building
#define LINO_BASE DIFFERENTIAL_DRIVE
// #define LINO_BASE SKID_STEER
// #define LINO_BASE ACKERMANN
// #define LINO_BASE MECANUM
IMU configuration:
//uncomment the IMU you're using
#define USE_GY85_IMU
// #define USE_MP6050_IMU
// #define USE_MPU9150_IMU
// #define USE_MPU9250_IMU
Motor driver configuration:
//uncomment the motor driver you're using
#define USE_L298_DRIVER
// #define USE_BTS7960_DRIVER
// #define USE_ESC
Motor configuration:
//define your robot' specs here
#define MAX_RPM 330 // motor's maximum RPM
#define COUNTS_PER_REV 1550 // wheel encoder's no of ticks per rev
#define WHEEL_DIAMETER 0.10 // wheel's diameter in meters
#define PWM_BITS 8 // PWM Resolution of the microcontroller
#define LR_WHEELS_DISTANCE 0.235 // distance between left and right wheels
#define FB_WHEELS_DISTANCE 0.30 // distance between front and rear wheels
Uploading the codes:
cd ~/linorobot_ws/src/linorobot/teensy/firmware
platformio run --target upload
Creating a Map
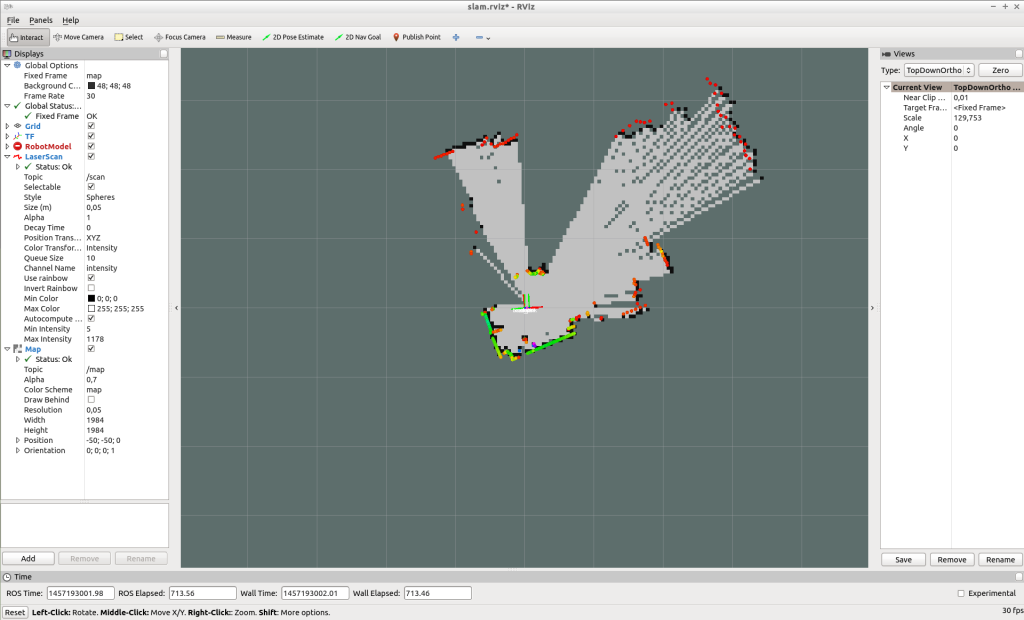
Launch base driver:
roslaunch linorobot bringup.launch
Launch mapping packages:
roslaunch linorobot slam.launch
Autonomous Navigation
Launch base driver:
roslaunch linorobot bringup.launch
Launch navigation packages:
roslaunch linorobot navigate.launch